当前位置:
X-MOL 学术
›
Mater. Horiz.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Light-controlled versatile manipulation of liquid metal droplets: a gateway to future liquid robots
Materials Horizons ( IF 12.2 ) Pub Date : 2021-07-27 , DOI: 10.1039/d1mh00647a Hongtai Ren 1 , Hu Jin 1 , Jian Shu 1 , Jie Xie 1 , Erlong Wang 1 , Du-An Ge 1 , Shi-Yang Tang 2 , Xiangpeng Li 3 , Weihua Li 4 , Shiwu Zhang 1
Materials Horizons ( IF 12.2 ) Pub Date : 2021-07-27 , DOI: 10.1039/d1mh00647a Hongtai Ren 1 , Hu Jin 1 , Jian Shu 1 , Jie Xie 1 , Erlong Wang 1 , Du-An Ge 1 , Shi-Yang Tang 2 , Xiangpeng Li 3 , Weihua Li 4 , Shiwu Zhang 1
Affiliation
|
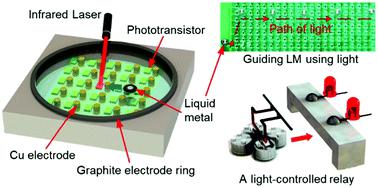
The controlled actuation of liquid metal (LM) droplets has recently shown great potential in developing smart actuating systems for applications in robotics. However, there is a lack of a simple approach for the precise manipulation of multiple LM droplets in a 2D plane, which hinders the development of complex control over droplets for realizing useful robotic applications. To overcome this challenge, here, a versatile and powerful light-induced manipulation of LM droplets is presented. The key principle is to selectively activate phototransistors in an electrolyte using infrared laser beams to electrically control LM droplets via Marangoni forces. This approach shows the ability of inducing concurrent motion, splitting, and merging of multiple LM droplets simply using light without complex and bulky systems. Parameters affecting the manipulation of LM droplets are thoroughly investigated. Moreover, a vehicle carrier driven by wheels composed of multiple LM droplets for making a light-controlled relay is demonstrated. We believe such a light-induced control method for manipulating LM droplets has the potential for advancing the development of future field-programmable robotics and droplet-based soft collaborative robots.
中文翻译:

液态金属液滴的光控多功能操纵:通往未来液态机器人的大门
液态金属 (LM) 液滴的受控驱动最近在开发用于机器人应用的智能驱动系统方面显示出巨大的潜力。然而,缺乏在二维平面中精确操纵多个 LM 液滴的简单方法,这阻碍了对液滴进行复杂控制以实现有用的机器人应用的发展。为了克服这一挑战,这里提出了一种多功能且强大的光诱导 LM 液滴操作。关键原理是使用红外激光束选择性地激活电解质中的光电晶体管,通过马兰戈尼部队。这种方法显示了只需使用光就可以诱导多个 LM 液滴的并发运动、分裂和合并,而无需复杂和庞大的系统。对影响 LM 液滴操作的参数进行了彻底研究。此外,还展示了由多个 LM 液滴组成的车轮驱动的车辆载体,用于制造光控继电器。我们相信这种用于操纵 LM 液滴的光诱导控制方法有可能促进未来现场可编程机器人和基于液滴的软协作机器人的发展。
更新日期:2021-08-03
中文翻译:
液态金属液滴的光控多功能操纵:通往未来液态机器人的大门
液态金属 (LM) 液滴的受控驱动最近在开发用于机器人应用的智能驱动系统方面显示出巨大的潜力。然而,缺乏在二维平面中精确操纵多个 LM 液滴的简单方法,这阻碍了对液滴进行复杂控制以实现有用的机器人应用的发展。为了克服这一挑战,这里提出了一种多功能且强大的光诱导 LM 液滴操作。关键原理是使用红外激光束选择性地激活电解质中的光电晶体管,通过马兰戈尼部队。这种方法显示了只需使用光就可以诱导多个 LM 液滴的并发运动、分裂和合并,而无需复杂和庞大的系统。对影响 LM 液滴操作的参数进行了彻底研究。此外,还展示了由多个 LM 液滴组成的车轮驱动的车辆载体,用于制造光控继电器。我们相信这种用于操纵 LM 液滴的光诱导控制方法有可能促进未来现场可编程机器人和基于液滴的软协作机器人的发展。










































 京公网安备 11010802027423号
京公网安备 11010802027423号