Brain Research ( IF 2.7 ) Pub Date : 2021-08-02 , DOI: 10.1016/j.brainres.2021.147607 Somayeh B Shafiei 1 , Umar Iqbal 1 , Ahmed A Hussein 2 , Khurshid A Guru 1
|
Objective
To develop an algorithm for objective evaluation of distraction of surgeons during robot-assisted surgery (RAS).
Materials and methods
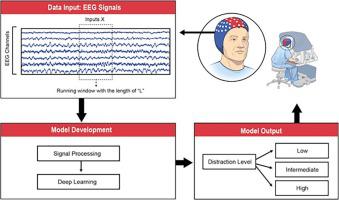
Electroencephalogram (EEG) of 22 medical students was recorded while performing five key tasks on the robotic surgical simulator: Instrument Control, Ball Placement, Spatial Control II, Fourth Arm Tissue Retraction, and Hands-on Surgical Training Tasks. All students completed the Surgery Task Load Index (SURG-TLX), which includes one domain for subjective assessment of distraction (scale: 1–20). Scores were divided into low (score 1–6, subjective label: 1), intermediate (score 7–12, subjective label: 2), and high distraction (score 13–20, subjective label: 3). These cut-off values were arbitrarily considered based on a verbal assessment of participants and experienced surgeons. A Deep Convolutional Neural Network (CNN) algorithm was trained utilizing EEG recordings from the medical students and used to classify their distraction levels. The accuracy of our method was determined by comparing the subjective distraction scores on SURG-TLX and the results from the proposed classification algorithm. Also, Pearson correlation was utilized to assess the relationship between performance scores (generated by the simulator) and distraction (Subjective assessment scores).
Results
The proposed end-to-end model classified distraction into low, intermediate, and high with 94%, 89%, and 95% accuracy, respectively. We found a significant negative correlation (r = -0.21; p = 0.003) between performance and SURG-TLX distraction scores.
Conclusions
Herein we report, to our knowledge, the first objective method to assess and quantify distraction while performing robotic surgical tasks on the robotic simulator, which may improve patient safety. Validation in the clinical setting is required.
中文翻译:
利用深度神经网络和脑电图客观评估外科医生在机器人辅助手术中的注意力分散
客观的
开发一种用于客观评估机器人辅助手术 (RAS) 期间外科医生分心的算法。
材料和方法
在机器人手术模拟器上执行五项关键任务时记录了 22 名医学生的脑电图 (EEG):仪器控制、球放置、空间控制 II、第四臂组织回缩和动手手术训练任务。所有学生都完成了手术任务负荷指数 (SURG-TLX),其中包括一个用于分心主观评估的领域(范围:1-20)。分数分为低(分数 1-6,主观标签:1)、中(分数 7-12,主观标签:2)和高分心(分数 13-20,主观标签:3)。这些临界值是根据参与者和经验丰富的外科医生的口头评估任意考虑的。使用医学生的脑电图记录训练深度卷积神经网络 (CNN) 算法,并用于对他们的分心程度进行分类。我们方法的准确性是通过比较 SURG-TLX 上的主观分心分数和所提出的分类算法的结果来确定的。此外,皮尔逊相关性被用来评估性能分数(由模拟器生成)和分心(主观评估分数)之间的关系。
结果
所提出的端到端模型将分心分为低、中和高,准确率分别为 94%、89% 和 95%。我们发现表现和 SURG-TLX 分心分数之间存在显着的负相关(r = -0.21;p = 0.003)。
结论
在这里,据我们所知,我们报告了在机器人模拟器上执行机器人手术任务时评估和量化分心的第一个客观方法,这可能会提高患者的安全性。需要在临床环境中进行验证。









































 京公网安备 11010802027423号
京公网安备 11010802027423号