当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Cutaneous Ionogel Mechanoreceptors for Soft Machines, Physiological Sensing, and Amputee Prostheses
Advanced Materials ( IF 27.4 ) Pub Date : 2021-08-01 , DOI: 10.1002/adma.202102069 Zequn Shen 1 , Xiangyang Zhu 1 , Carmel Majidi 2 , Guoying Gu 1
Advanced Materials ( IF 27.4 ) Pub Date : 2021-08-01 , DOI: 10.1002/adma.202102069 Zequn Shen 1 , Xiangyang Zhu 1 , Carmel Majidi 2 , Guoying Gu 1
Affiliation
|
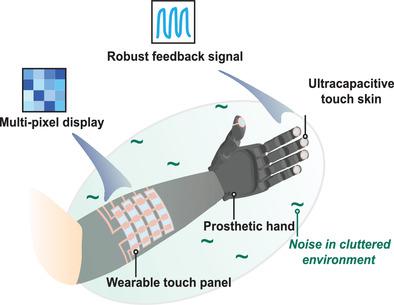
Touch sensing has a central role in robotic grasping and emerging human–machine interfaces for robot-assisted prosthetics. Although advancements in soft conductive polymers have promoted the creation of diverse pressure sensors, these sensors are difficult to be employed as touch skins for robotics and prostheses due to their limited sensitivity, narrow pressure range, and complex structure and fabrication process. Here, a highly sensitive and robust soft touch skin is presented with ultracapacitive sensing that combines ionic hydrogels with commercially available conductive fabrics. Prototypical designs of the capacitive sensors through facile manufacturing methods are introduced and a high sensitivity up to 1.5 kPa−1 (≈44 times higher than conventional parallel-plate capacitive counterparts), a broad pressure detection range of over four orders of magnitudes (≈35 Pa to 330 kPa), ultrahigh baseline of capacitance, fast response time (≈18 ms), and good repeatability are demonstrated. Ionogel skins composed of an array of cutaneous mechanoreceptors capable of monitoring various physiological signals and shape detection are further developed. The touch skin can be integrated within a soft bionic hand and provide an industrial robot and an amputee with robust tactile feedback when handling delicate objects, illustrating its potential applications in next-generation human-in-the-loop robotic systems with tactile sensing.
中文翻译:

用于软机器、生理传感和截肢假肢的皮肤离子凝胶机械感受器
触摸传感在机器人抓取和机器人辅助假肢的新兴人机界面中发挥着核心作用。尽管软导电聚合物的进步促进了各种压力传感器的创建,但由于其有限的灵敏度、窄的压力范围以及复杂的结构和制造工艺,这些传感器很难用作机器人和假肢的触摸皮肤。在这里,高度敏感且坚固的柔软触感皮肤采用超电容传感技术,将离子水凝胶与市售导电织物相结合。通过简便的制造方法介绍了电容式传感器的原型设计,其灵敏度高达 1.5 kPa -1 (约比传统平行板电容式传感器高 44 倍),压力检测范围较宽,超过四个数量级(约 35 Pa 至 330 kPa)、超高电容基线、快速响应时间(约 18 ms)和良好的重复性。进一步开发了由一系列皮肤机械感受器组成的离子凝胶皮肤,能够监测各种生理信号和形状检测。触摸皮肤可以集成到柔软的仿生手中,并为工业机器人和截肢者在处理精致物体时提供强大的触觉反馈,这说明了其在具有触觉传感的下一代人机循环机器人系统中的潜在应用。
更新日期:2021-09-21
中文翻译:
用于软机器、生理传感和截肢假肢的皮肤离子凝胶机械感受器
触摸传感在机器人抓取和机器人辅助假肢的新兴人机界面中发挥着核心作用。尽管软导电聚合物的进步促进了各种压力传感器的创建,但由于其有限的灵敏度、窄的压力范围以及复杂的结构和制造工艺,这些传感器很难用作机器人和假肢的触摸皮肤。在这里,高度敏感且坚固的柔软触感皮肤采用超电容传感技术,将离子水凝胶与市售导电织物相结合。通过简便的制造方法介绍了电容式传感器的原型设计,其灵敏度高达 1.5 kPa -1 (约比传统平行板电容式传感器高 44 倍),压力检测范围较宽,超过四个数量级(约 35 Pa 至 330 kPa)、超高电容基线、快速响应时间(约 18 ms)和良好的重复性。进一步开发了由一系列皮肤机械感受器组成的离子凝胶皮肤,能够监测各种生理信号和形状检测。触摸皮肤可以集成到柔软的仿生手中,并为工业机器人和截肢者在处理精致物体时提供强大的触觉反馈,这说明了其在具有触觉传感的下一代人机循环机器人系统中的潜在应用。










































 京公网安备 11010802027423号
京公网安备 11010802027423号