Microelectronic Engineering ( IF 2.6 ) Pub Date : 2021-07-30 , DOI: 10.1016/j.mee.2021.111601 Yongcun Hao 1, 2 , Chenggang Wang 1 , Zheng Sun 1 , Weizheng Yuan 1 , Honglong Chang 1
|
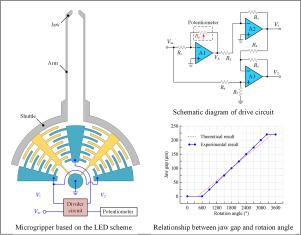
Nonlinearity is a common problem for many types of microgrippers and can make it difficult to achieve high precision control over the entire input variation range. This paper presents a linear electrostatic driving scheme consisting of a bidirectional rotary actuator and a divider circuit for microgrippers. Different from the conventional approach, the rotary actuator in the linear electrostatic driving scheme is driven by two differential driving voltages provided by the divider circuit. Using the linear electrostatic driving scheme, the displacement of the microgripper's jaw is proportional to the resistance of potentiometer of the divider circuit. The experiment shows that the jaw gap of the microgripper varies from 0 to 220 μm when the potentiometer rotates from 300° to 3240°. The nonlinear error of the rotatory microgripper is 0.14%, which is an improvement of over 100 times compared with the conventional driving scheme. In addition, a pick–release grasping experiment on glass spheres is performed to prove the capability of the rotatory microgripper in handling micro objects.
中文翻译:
基于线性静电驱动方案的旋转微夹持器
非线性是许多类型微夹具的常见问题,并且很难在整个输入变化范围内实现高精度控制。本文提出了一种线性静电驱动方案,由双向旋转致动器和微夹持器的分配器电路组成。与传统方法不同,线性静电驱动方案中的旋转致动器由分压器电路提供的两个差分驱动电压驱动。采用线性静电驱动方案,微夹爪的位移与分压器电路电位器的电阻成正比。实验表明,当电位器从 300° 旋转到 3240° 时,微夹持器的钳口间隙在 0 到 220 μm 之间变化。旋转式微夹具的非线性误差为 0.14%,与传统驱动方案相比提高了100多倍。此外,还对玻璃球进行了拾取-释放抓取实验,以证明旋转微夹持器在处理微小物体方面的能力。










































 京公网安备 11010802027423号
京公网安备 11010802027423号