当前位置:
X-MOL 学术
›
Mater. Horiz.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
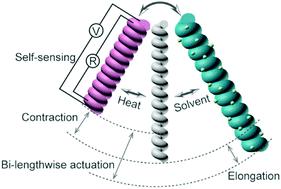
Self-sensing coaxial muscle fibers with bi-lengthwise actuation
Materials Horizons ( IF 13.3 ) Pub Date : 2021-07-23 , DOI: 10.1039/d1mh00743b Lizhong Dong 1, 2 , Ming Ren 1, 2 , Yulian Wang 1, 2 , Jian Qiao 2 , Yulong Wu 2 , Jianfeng He 1, 2 , Xulin Wei 1, 2 , Jiangtao Di 1, 2, 3 , Qingwen Li 1, 2, 3
Materials Horizons ( IF 13.3 ) Pub Date : 2021-07-23 , DOI: 10.1039/d1mh00743b Lizhong Dong 1, 2 , Ming Ren 1, 2 , Yulian Wang 1, 2 , Jian Qiao 2 , Yulong Wu 2 , Jianfeng He 1, 2 , Xulin Wei 1, 2 , Jiangtao Di 1, 2, 3 , Qingwen Li 1, 2, 3
Affiliation
|
Artificial muscle fibers as a promising biomimetic actuator are needed for such applications as smart soft robots, muscle function restoration, and physical augmentation. Currently developed artificial muscle fibers have shown attractive performance in contractile and torsional actuations. However, the contractile muscle fibers do not have the capability of stimulus-responsive elongation, and real-time identifying their contractile position by themselves is still challenging. We report herein the preparation of a Ti3C2Tx MXene/single walled carbon-nanotubes (SWCNTs)-coated carbon nanotube (CNT)@polydimethylsiloxane (PDMS) coaxial muscle fiber that integrates the important features of self-position sensing and bi-lengthwise actuation. The bi-lengthwise actuation is realized by utilizing the large expansion coefficient difference of PDMS in response to solvent and heat, which results in ∼5% maximum elongation by n-heptane adsorption and ∼19% maximum contraction by electric heating under the optimal conditions. Meanwhile, due to the piezoresistive effect of the MXene/SWCNTs layer, the resistance change of this coating layer is almost linearly dependent on the contraction of the coaxial muscle fiber, providing a function of real-time self-position sensing. Furthermore, an application of using a bundle of these multifunctional coaxial muscle fibers for a bionic arm has been demonstrated, which provides new insights into the design of integrated intelligent artificial muscles with synergistic multiple functions.
中文翻译:

具有双向驱动的自感应同轴肌纤维
在智能软机器人、肌肉功能恢复和身体增强等应用中,需要人造肌肉纤维作为一种有前途的仿生致动器。目前开发的人造肌肉纤维在收缩和扭转驱动方面显示出有吸引力的性能。然而,收缩肌纤维不具备刺激响应性伸长的能力,实时识别其收缩位置仍然具有挑战性。我们在此报告了 Ti 3 C 2 T x的制备MXene/单壁碳纳米管 (SWCNT) 涂层碳纳米管 (CNT)@聚二甲基硅氧烷 (PDMS) 同轴肌纤维,集成了自位置传感和双向驱动的重要特性。双向驱动是通过利用 PDMS 对溶剂和热的响应的大膨胀系数差异实现的,这导致在最佳条件下,正庚烷吸附的最大伸长率约为 5%,电加热的最大收缩率约为 19%。同时,由于 MXene/SWCNTs 层的压阻效应,该涂层的电阻变化几乎线性地依赖于同轴肌纤维的收缩,提供了实时自位置传感的功能。此外,
更新日期:2021-07-23
中文翻译:
具有双向驱动的自感应同轴肌纤维
在智能软机器人、肌肉功能恢复和身体增强等应用中,需要人造肌肉纤维作为一种有前途的仿生致动器。目前开发的人造肌肉纤维在收缩和扭转驱动方面显示出有吸引力的性能。然而,收缩肌纤维不具备刺激响应性伸长的能力,实时识别其收缩位置仍然具有挑战性。我们在此报告了 Ti 3 C 2 T x的制备MXene/单壁碳纳米管 (SWCNT) 涂层碳纳米管 (CNT)@聚二甲基硅氧烷 (PDMS) 同轴肌纤维,集成了自位置传感和双向驱动的重要特性。双向驱动是通过利用 PDMS 对溶剂和热的响应的大膨胀系数差异实现的,这导致在最佳条件下,正庚烷吸附的最大伸长率约为 5%,电加热的最大收缩率约为 19%。同时,由于 MXene/SWCNTs 层的压阻效应,该涂层的电阻变化几乎线性地依赖于同轴肌纤维的收缩,提供了实时自位置传感的功能。此外,


























 京公网安备 11010802027423号
京公网安备 11010802027423号