Precision Engineering ( IF 3.5 ) Pub Date : 2021-07-15 , DOI: 10.1016/j.precisioneng.2021.07.008 Yijie Liu 1, 2 , Zhen Zhang 1, 2
|
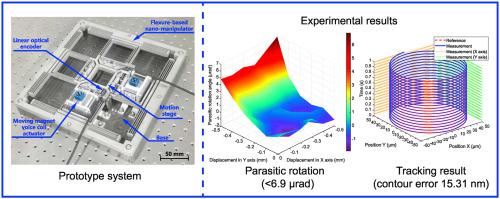
There is an increasing demand to achieve manipulating operations in nanometric precision and a macro-range (over a millimeter) simultaneously. In principle, it is possible to satisfy both requirements in a compact size taking advantages of flexure-based mechanisms, whereas limitations such as the parasitic rotation, cross-axis coupling, saturation may adversely affect the motion quality in nanometric level practically. Here, we propose a novel design methodology to actively prevent parasitic rotation of XY compliant mechanisms. Further, by means of design synthesis and real-time motion control, the prototype of manipulator is fabricated, which enables large motion range (±3 mm) along each actuation axis. Experimental results demonstrate a travel range of 2 mm × 2 mm with high linearity, small cross-axis coupling (< 0.4%), and low parasitic rotation (< 6.9 μ rad over 0.5 mm × 0.5 mm motion range). Moreover, the high natural frequency (~ 60 Hz) of the manipulator facilitates it to achieve high-precision motion with tracking error < 80 nm (20 Hz sinusoids). The experimental results of the proposed nano-manipulator outperform most of the existing ones.
中文翻译:
具有主动寄生旋转抑制功能的大范围兼容 XY 纳米机械手
同时实现纳米精度和宏观范围(超过一毫米)的操纵操作的需求不断增加。原则上,有可能满足这两个要求在一个紧凑的尺寸考虑的优点基于弯曲部分的机制,而如寄生旋转,交叉轴耦合的限制,饱和度可能不利地运动质量影响在纳米水平几乎。在这里,我们提出了一种新颖的设计方法来积极防止XY 顺应机制的寄生旋转。进一步,通过设计综合和实时运动控制,制作了机械手样机。, 这使得沿每个驱动轴的运动范围大(±3 mm)。实验结果表明行程范围为 2 mm × 2 mm, 具有高线性度、小交叉轴耦合 (< 0.4%) 和低寄生旋转(< 6.9 μ rad 在 0.5 mm × 0.5 mm 运动范围内)。此外,机械手的高固有频率 (~ 60 Hz) 有助于实现高精度运动,跟踪误差 < 80 nm(20 Hz 正弦曲线)。所提出的纳米机械手的实验结果优于大多数现有的。










































 京公网安备 11010802027423号
京公网安备 11010802027423号