Computers & Graphics ( IF 2.5 ) Pub Date : 2021-07-16 , DOI: 10.1016/j.cag.2021.07.009 Vuthea Chheang 1 , Patrick Saalfeld 1 , Fabian Joeres 1 , Christian Boedecker 2 , Tobias Huber 2 , Florentine Huettl 2 , Hauke Lang 2 , Bernhard Preim 1 , Christian Hansen 1
|
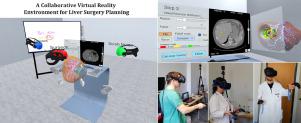
Surgical planning software is a key component in the treatment of tumor diseases. However, desktop-based systems provide only limited visualization and interaction opportunities. Moreover, collaborative planning among members of a surgical team is only possible to a limited extent. In this work, a collaborative virtual reality (VR) environment to assist liver surgeons in tumor surgery planning is presented. Our aim is to improve virtual resection planning between surgeons in a remote or co-located environment. The system allows surgeons to define and adjust virtual resections on patient-specific organ 3D surfaces and 2D image slices. Changes on both modalities are synchronized, which will enable surgeons to iterate and refine the resection surfaces quickly. In addition, a real-time risk map visualization is presented that displays safety margins around tumors. An evaluation performed by liver surgeons provides information on potential benefits, such as the possibility to visualize complex cases and assessing the safety-critical areas, applicability, and limitations for further improvement.
中文翻译:
用于肝脏手术计划的协作虚拟现实环境
手术计划软件是治疗肿瘤疾病的关键组成部分。然而,基于桌面的系统仅提供有限的可视化和交互机会。此外,手术团队成员之间的协作计划只能在有限的范围内进行。在这项工作中,提出了一种协作虚拟现实 (VR) 环境,以协助肝脏外科医生进行肿瘤手术计划。我们的目标是改善远程或同地环境中外科医生之间的虚拟切除计划。该系统允许外科医生在患者特定器官 3D 表面和 2D 图像切片上定义和调整虚拟切除。两种方式的变化是同步的,这将使外科医生能够快速迭代和改进切除表面。此外,呈现实时风险图可视化,显示肿瘤周围的安全边界。肝外科医生进行的评估提供了有关潜在益处的信息,例如可视化复杂病例的可能性以及评估安全关键区域、适用性和进一步改进的局限性。








































 京公网安备 11010802027423号
京公网安备 11010802027423号