Computers & Graphics ( IF 2.5 ) Pub Date : 2021-07-15 , DOI: 10.1016/j.cag.2021.07.011 Amir M. Mirzendehdel 1 , Morad Behandish 1 , Saigopal Nelaturi 1
|
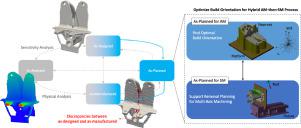
Parts fabricated by additive manufacturing (AM) are often fabricated first as a near-net shape, a combination of intended nominal geometry and sacrificial support structures, which need to be removed in a subsequent post-processing stage using subtractive manufacturing (SM). In this paper, we present a framework for optimizing the build orientation with respect to removability of support structures. In particular, given a general multi-axis machining setup and sampled build orientations, we define a Pareto-optimality criterion based on the total support volume and the “secluded” support volume defined as the support volume that is not accessible by a given set of machining tools. Since total support volume mainly depends on the build orientation and the secluded volume is dictated by the machining setup, in many cases the two objectives are competing and their trade-off needs to be taken into account. The accessibility analysis relies on the inaccessibility measure field (IMF), which is a continuous field in the Euclidean space that quantifies the inaccessibility of each point given a collection of tools and fixturing devices. The value of IMF at each point indicates the minimum possible volumetric collision between objects in relative motion including the part, fixtures, and the tools, over all possible tool orientations and sharp points on the tool. We also propose an automated support removal planning algorithm based on IMF, where a sequence of actions are provided in terms of the fixturing devices, cutting tools, and tool orientation at each step. In our approach, each step is chosen based on the maximal removable volume to iteratively remove accessible supports. The effectiveness of the proposed approach is demonstrated through benchmark examples in 2D and realistic examples in 3D.
中文翻译:
使用多轴加工优化支撑移除的构建方向
通过增材制造 (AM) 制造的零件通常首先制造为近净形状,即预期标称几何形状和牺牲支撑结构的组合,需要在随后的后处理阶段使用减材制造 (SM) 去除。在本文中,我们提出了一个框架,用于根据支撑结构的可移动性优化构建方向。特别是,给定一般的多轴加工设置和采样构建方向,我们根据总支撑体积和定义为无法访问的支撑体积的“隔离”支撑体积定义帕累托最优标准通过一组给定的加工工具。由于总支撑体积主要取决于构建方向,而隐蔽体积由加工设置决定,在许多情况下,这两个目标是相互竞争的,需要考虑它们的权衡。可访问性分析依赖于不可访问性度量字段(IMF),它是欧几里得空间中的一个连续场,它量化了给定工具和夹具设备集合的每个点的不可达性。每个点的 IMF 值表示相对运动的对象(包括零件、夹具和工具)在所有可能的工具方向和工具上的尖点上的最小可能体积碰撞。我们还提出了一种基于 IMF 的自动支撑移除规划算法,其中在每个步骤中根据夹具设备、切削刀具和刀具方向提供了一系列动作。在我们的方法中,每个步骤都是根据最大可移动体积选择的,以迭代地移除可访问的支持。通过 2D 中的基准示例和 3D 中的实际示例证明了所提出方法的有效性。








































 京公网安备 11010802027423号
京公网安备 11010802027423号