当前位置:
X-MOL 学术
›
Int. J. Commun. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
An evolving α-dependent mobility model for a fleet of unmanned aerial vehicles in wireless sensor networks
International Journal of Communication Systems ( IF 1.7 ) Pub Date : 2021-07-15 , DOI: 10.1002/dac.4926 Ramkrishna Ghosh 1 , Suneeta Mohanty 1 , Prasant Kumar Pattnaik 1
International Journal of Communication Systems ( IF 1.7 ) Pub Date : 2021-07-15 , DOI: 10.1002/dac.4926 Ramkrishna Ghosh 1 , Suneeta Mohanty 1 , Prasant Kumar Pattnaik 1
Affiliation
|
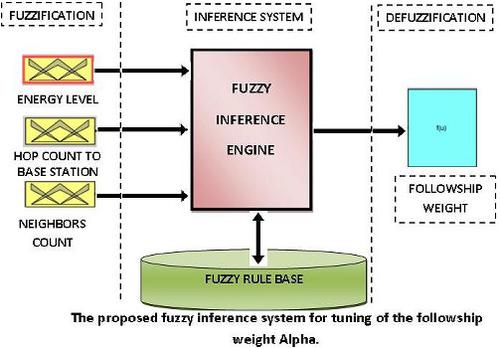
In this paper, we represent an innovative α-based mobility model for a fleet of unmanned aerial vehicles (UAVs) using Sugeno type-2 fuzzy inference system (T2FIS) in wireless sensor networks (WSNs). Specifically, the spotlight is on the deployment of suchlike energy level, neighbor count, and hop count to base station (BS) solution to critical applications, like monitoring applications for public security, border control enforcement, and so on. A type-2 fuzzy logic (T2FL)-dependent α mobility controller is introduced to support on the variation of a followship weighting metric α to select that close by UAV is the relevant to be pursued. Modification the proper values for the followship weight α is somewhat a demanding function. We have selected T2FL app for variation the values of the followship metric α choosing appropriate type-2 fuzzy signifiers essentially energy level, neighbor count, and hop count to BS. T2FIS is utilized to pick the appropriate followship weight computation. Efficacy of the suggested framework is made by way of analysis of the statistics and multiple linear regressions (MLRs).
中文翻译:

无线传感器网络中无人机车队的进化依赖于α的移动模型
在本文中,我们使用无线传感器网络 (WSN) 中的 Sugeno 2 型模糊推理系统 (T2FIS),为无人机 (UAV) 车队提出了一种基于α的创新移动模型。具体而言,重点是将诸如能量级别、邻居计数和跳数到基站 (BS) 解决方案之类的部署部署到关键应用程序,例如公共安全监控应用程序、边境控制执法等。引入了类型 2 模糊逻辑 (T2FL) 相关的α移动控制器,以支持跟随权重度量α的变化,以选择接近的 UAV 是相关的追求。修改随船重量α的适当值有点苛刻的功能。我们选择了 T2FL 应用程序来改变跟随度量α的值,选择适当的类型 2 模糊能指,主要是对 BS 的能量水平、邻居计数和跳数。T2FIS 用于选择合适的后续重量计算。建议框架的有效性是通过统计分析和多元线性回归 (MLR) 来确定的。
更新日期:2021-08-16
中文翻译:
无线传感器网络中无人机车队的进化依赖于α的移动模型
在本文中,我们使用无线传感器网络 (WSN) 中的 Sugeno 2 型模糊推理系统 (T2FIS),为无人机 (UAV) 车队提出了一种基于α的创新移动模型。具体而言,重点是将诸如能量级别、邻居计数和跳数到基站 (BS) 解决方案之类的部署部署到关键应用程序,例如公共安全监控应用程序、边境控制执法等。引入了类型 2 模糊逻辑 (T2FL) 相关的α移动控制器,以支持跟随权重度量α的变化,以选择接近的 UAV 是相关的追求。修改随船重量α的适当值有点苛刻的功能。我们选择了 T2FL 应用程序来改变跟随度量α的值,选择适当的类型 2 模糊能指,主要是对 BS 的能量水平、邻居计数和跳数。T2FIS 用于选择合适的后续重量计算。建议框架的有效性是通过统计分析和多元线性回归 (MLR) 来确定的。










































 京公网安备 11010802027423号
京公网安备 11010802027423号