Mechatronics ( IF 3.3 ) Pub Date : 2021-07-09 , DOI: 10.1016/j.mechatronics.2021.102598 Vahid Izadi 1 , Amir H. Ghasemi 1
|
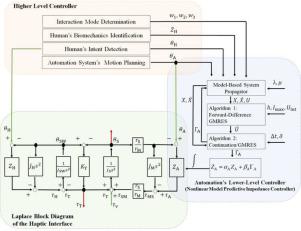
This paper presents an adaptive haptic shared control framework wherein a driver and an automation system are physically connected through a motorized steering wheel. An adaptive impedance controller for the automation system is introduced to enable the automation system to dynamically and smoothly exchange the control authority with the human partner. To determine an optimal modulation policy, a cost function is considered, and its terms are defined to minimize the performance error and reduce the disagreement between the human and automation system. We employed a nonlinear stochastic model predictive approach to solve the cost function subjected to probabilistic uncertainties in human’s biomechanics. The polynomial chaos expansions are employed to obtain a computationally tractable form of the cost function, and the continuation generalized minimum residual method is utilized to solve the tractable nonlinear cost function. To demonstrate the effectiveness of the proposed approach, we consider a scenario where the human and the automation system both detect an obstacle and negotiate on controlling the steering wheel so that the obstacle can be avoided safely. For this scenario, four interaction modes are defined based on the cooperation status (cooperative and uncooperative) and the control transfer’s desired direction (human to automation or automation to human). The numerical results demonstrate that when the human’s control command is sufficient for avoiding the obstacle, by modulating and adopting smaller values for the impedance controller, the disagreement between the human and automation systems can be reduced. On the other hand, when the human’s control command is insufficient, by modulating and adopting larger values for the impedance controller parameters, the automation system gains the control authority and ensures the safety of the obstacle avoidance task. Additionally, we performed a set of tests with processors in the loop (PIL) to show the proposed predictive controller can compute the optimal modulation policy in real-time. Using two low-cost micro-controllers, the PIL results show high computational speed and numerical accuracy for the proposed method.
中文翻译:
自适应触觉共享控制范式中控制权限的调制
本文提出了一种自适应触觉共享控制框架,其中驾驶员和自动化系统通过电动方向盘进行物理连接。引入了自动化系统的自适应阻抗控制器,使自动化系统能够与人类伙伴动态平滑地交换控制权限。为了确定最佳调制策略,需要考虑成本函数,并定义其项以最小化性能误差并减少人与自动化系统之间的分歧。我们采用非线性随机模型预测方法来解决受人类生物力学概率不确定性影响的成本函数。多项式混沌展开用于获得成本函数的计算上易于处理的形式,并利用延续广义最小残差法求解易处理的非线性代价函数。为了证明所提出方法的有效性,我们考虑了一个场景,其中人类和自动化系统都检测到障碍物并协商控制方向盘,以便可以安全地避开障碍物。对于这个场景,根据合作状态(合作和不合作)和控制转移的期望方向(人到自动化或自动化到人)定义了四种交互模式。数值结果表明,当人的控制指令足以避开障碍物时,通过对阻抗控制器进行调制和采用较小的值,可以减少人与自动化系统之间的分歧。另一方面,当人的控制指令不足时,通过对阻抗控制器参数进行调制和采用较大的值,自动化系统获得控制权,保证避障任务的安全。此外,我们对循环中的处理器 (PIL) 进行了一组测试,以显示所提出的预测控制器可以实时计算最佳调制策略。使用两个低成本的微控制器,PIL 结果表明所提出的方法具有较高的计算速度和数值精度。我们使用循环中的处理器 (PIL) 执行了一组测试,以显示所提出的预测控制器可以实时计算最佳调制策略。使用两个低成本的微控制器,PIL 结果表明所提出的方法具有较高的计算速度和数值精度。我们使用循环中的处理器 (PIL) 执行了一组测试,以显示所提出的预测控制器可以实时计算最佳调制策略。使用两个低成本的微控制器,PIL 结果表明所提出的方法具有较高的计算速度和数值精度。


























 京公网安备 11010802027423号
京公网安备 11010802027423号