当前位置:
X-MOL 学术
›
Int. J. Commun. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Vulnerable road user safety: A systematic review and mesh-networking based vehicle ad hoc system using hybrid of neuro-fuzzy and genetic algorithms
International Journal of Communication Systems ( IF 1.7 ) Pub Date : 2021-07-07 , DOI: 10.1002/dac.4907 Insha Altaf 1 , Ajay Kaul 1
International Journal of Communication Systems ( IF 1.7 ) Pub Date : 2021-07-07 , DOI: 10.1002/dac.4907 Insha Altaf 1 , Ajay Kaul 1
Affiliation
|
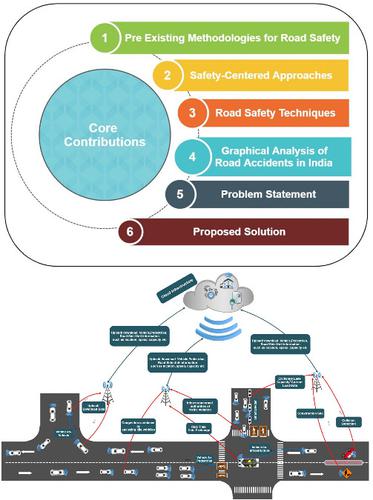
Intelligent Transport System (ITS) involves a number of Information and Communication Technology (ICT) interventions for efficient road safety management. Over the last few decades, there has been a significant increase in the safety of Vulnerable Road Users (VRU's). This study aims to identify the most frequent, regularly occurring causes of road accidents and outline actions that can be used as a baseline for improving road traffic safety. The main contributions in this paper include the following: a graphical investigation for finding out the overall rate of road accidents (injuries and deaths) in India. Based on graphical analysis, major loopholes responsible for road accidents in India are summed up. This paper discusses various issues faced by already available pedestrian and vehicular safety techniques. After analysis of the available techniques and their related case studies in a systematic way, it is observed that they are not able to overcome the loopholes (Collision Occurrence, Traffic Congestion, Pedestrian Crossing alert, Red Light violation, and Non-Propagation of Distress Signal) present in the current “Road Transport Management (RTM) System” of India. Finally, after deep analysis of already available techniques, a futuristic approach “Mesh-Networking based Vehicle Ad-Hoc System (MN-VAS) using hybrid of Neuro-Fuzzy and Genetic Algorithm based Load Balancing on Node” is proposed for the safety of VRU's. This hybrid approach has been discussed with domain experts for practical input, and we concluded that this might be a good option for better RTM System in India.
中文翻译:

脆弱的道路使用者安全:使用神经模糊和遗传算法混合的基于系统审查和网状网络的车辆自组织系统
智能交通系统 (ITS) 涉及许多用于有效道路安全管理的信息和通信技术 (ICT) 干预措施。在过去的几十年里,弱势道路使用者 (VRU) 的安全有了显着提高。本研究旨在确定道路事故最常见、经常发生的原因,并概述可用作改善道路交通安全基线的行动。本文的主要贡献包括以下内容: 用于找出印度道路事故(受伤和死亡)总体比率的图形调查。通过图形分析,总结出导致印度道路交通事故的主要漏洞。本文讨论了现有行人和车辆安全技术面临的各种问题。在系统地分析可用技术及其相关案例研究后,观察到它们无法克服漏洞(碰撞发生、交通拥堵、人行横道警报、闯红灯和遇险信号不传播) ) 存在于印度当前的“道路运输管理 (RTM) 系统”中。最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。据观察,他们无法克服印度当前“道路运输管理(RTM)系统”中存在的漏洞(发生碰撞、交通拥堵、人行横道警报、闯红灯和不传播遇险信号) . 最后,在对现有技术进行深入分析后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。据观察,他们无法克服印度当前“道路运输管理(RTM)系统”中存在的漏洞(发生碰撞、交通拥堵、人行横道警报、闯红灯和不传播遇险信号) . 最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。和不传播遇险信号)存在于印度当前的“道路运输管理 (RTM) 系统”中。最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。和不传播遇险信号)存在于印度当前的“道路运输管理 (RTM) 系统”中。最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。为了 VRU 的安全,提出了一种未来的方法“基于网格网络的车辆自组织系统 (MN-VAS),使用神经模糊和基于遗传算法的节点负载平衡的混合”。已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。为了 VRU 的安全,提出了一种未来的方法“基于网格网络的车辆自组织系统 (MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”。已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。
更新日期:2021-08-04
中文翻译:
脆弱的道路使用者安全:使用神经模糊和遗传算法混合的基于系统审查和网状网络的车辆自组织系统
智能交通系统 (ITS) 涉及许多用于有效道路安全管理的信息和通信技术 (ICT) 干预措施。在过去的几十年里,弱势道路使用者 (VRU) 的安全有了显着提高。本研究旨在确定道路事故最常见、经常发生的原因,并概述可用作改善道路交通安全基线的行动。本文的主要贡献包括以下内容: 用于找出印度道路事故(受伤和死亡)总体比率的图形调查。通过图形分析,总结出导致印度道路交通事故的主要漏洞。本文讨论了现有行人和车辆安全技术面临的各种问题。在系统地分析可用技术及其相关案例研究后,观察到它们无法克服漏洞(碰撞发生、交通拥堵、人行横道警报、闯红灯和遇险信号不传播) ) 存在于印度当前的“道路运输管理 (RTM) 系统”中。最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。据观察,他们无法克服印度当前“道路运输管理(RTM)系统”中存在的漏洞(发生碰撞、交通拥堵、人行横道警报、闯红灯和不传播遇险信号) . 最后,在对现有技术进行深入分析后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。据观察,他们无法克服印度当前“道路运输管理(RTM)系统”中存在的漏洞(发生碰撞、交通拥堵、人行横道警报、闯红灯和不传播遇险信号) . 最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。和不传播遇险信号)存在于印度当前的“道路运输管理 (RTM) 系统”中。最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。和不传播遇险信号)存在于印度当前的“道路运输管理 (RTM) 系统”中。最后,在深入分析现有技术后,提出了一种未来主义的方法“基于网格网络的车辆自组织系统(MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”,以确保 VRU 的安全. 已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。为了 VRU 的安全,提出了一种未来的方法“基于网格网络的车辆自组织系统 (MN-VAS),使用神经模糊和基于遗传算法的节点负载平衡的混合”。已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。为了 VRU 的安全,提出了一种未来的方法“基于网格网络的车辆自组织系统 (MN-VAS),在节点上使用神经模糊和基于遗传算法的混合负载平衡”。已经与领域专家讨论了这种混合方法以获得实际投入,我们得出的结论是,这可能是印度更好的 RTM 系统的不错选择。










































 京公网安备 11010802027423号
京公网安备 11010802027423号