ISPRS Journal of Photogrammetry and Remote Sensing ( IF 10.6 ) Pub Date : 2021-07-05 , DOI: 10.1016/j.isprsjprs.2021.06.009 Shuhuan Wen 1, 2, 3 , Xin Liu 1, 2 , Hong Zhang 3 , Fuchun Sun 4, 5 , Miao Sheng 1, 2 , Shaokang Fan 1, 2
|
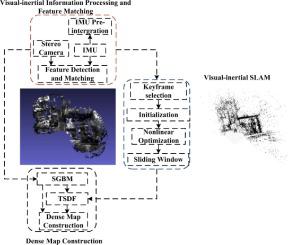
Mobile vehicles require accurate localization and dense mapping for motion planning. In this paper, we propose a dense map construction algorithm based on a light-and-fast stereo visual-inertial navigation system (VINS). A tightly coupled nonlinear optimization method is used to calculate the position of adjacent keyframes. An optical flow tracking method fused with IMU information and ring matching constraints is used to improve the matching accuracy and speed of the feature points. In addition, we obtain the pose and depth values using the semi-global block matching (SGBM) method, which are used as the initial values of the depth filter to update the depth image and improve the convergence speed. Then, we further use the Truncated Signed Distance Function (TSDF) method to construct the dense map. We compare our algorithm with state-of-the-art algorithms on the EuRoc dataset and then compare the estimated depth image using the proposed algorithm and the point cloud construction with the probabilistic monocular dense reconstruction (REMODE). The experiments show that the proposed algorithm can obtain more accurate localization than VINS and OKVIS, as well as a faster tracking speed, a better depth map, a lower convergence time for the estimated image and a lower number of updated frames than REMODE.
中文翻译:
基于立体VINS的移动车辆密集点云图构建
移动车辆需要精确定位和密集映射以进行运动规划。在本文中,我们提出了一种基于轻快立体视觉惯性导航系统(VINS)的密集地图构建算法。紧耦合非线性优化方法用于计算相邻关键帧的位置。采用融合IMU信息和环匹配约束的光流跟踪方法来提高特征点的匹配精度和速度。此外,我们使用半全局块匹配(SGBM)方法获得位姿和深度值,作为深度滤波器的初始值来更新深度图像并提高收敛速度。然后,我们进一步使用截断符号距离函数(TSDF)方法来构建密集图。我们将我们的算法与 EuRoc 数据集上的最先进算法进行比较,然后将使用所提出算法的估计深度图像和点云构造与概率单目密集重建 (REMODE) 进行比较。实验表明,与REMODE相比,所提出的算法可以获得比VINS和OKVIS更准确的定位,以及更快的跟踪速度、更好的深度图、更短的估计图像收敛时间和更少的更新帧数。










































 京公网安备 11010802027423号
京公网安备 11010802027423号