Mechatronics ( IF 3.1 ) Pub Date : 2021-06-30 , DOI: 10.1016/j.mechatronics.2021.102583 Haohan Yang , Wentong Liu , Li Chen , Fan Yu
|
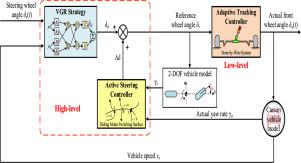
This paper proposes a novel adaptive hierarchical control approach for Steer-by-Wire (SbW) vehicles to improve the handling stability. The high-level stability control scheme contains a variable steering ratio (VSR) strategy based on the adaptive-network-based fuzzy inference system (ANFIS) and an active front steering (AFS) controller designed with the integral sliding mode method by tracking the expected yaw rate, in which the desired front wheel angle is generated to enhance the cornering stability performance. Besides, an adaptive tracking controller (ATC) for the SbW system is designed by using the adaptive sliding mode control method to achieve desired steering performance in the lower level. The proposed adaptive control strategy is validated with different driving circles from ISO standards in simulation tests and hardware-in-the-loop (HiL) experiments. The results demonstrate that the designed control approach improve the vehicle handling stability significantly, even in some extreme driving conditions.
中文翻译:
基于线控转向系统的车辆操纵稳定性改进自适应分层控制方法
本文提出了一种用于线控转向 (SbW) 车辆的新型自适应分层控制方法,以提高操纵稳定性。高级稳定性控制方案包含基于自适应网络模糊推理系统 (ANFIS) 的可变转向比 (VSR) 策略和采用积分滑模方法设计的主动前转向 (AFS) 控制器,通过跟踪预期偏航率,其中产生所需的前轮角度以增强转弯稳定性性能。此外,通过使用自适应滑模控制方法设计了一种用于 SbW 系统的自适应跟踪控制器(ATC),以在较低级别实现所需的转向性能。所提出的自适应控制策略在仿真测试和硬件在环 (HiL) 实验中使用来自 ISO 标准的不同驱动圈进行了验证。结果表明,即使在某些极端驾驶条件下,所设计的控制方法也能显着提高车辆的操纵稳定性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号