Chemical Engineering Journal ( IF 13.3 ) Pub Date : 2021-06-23 , DOI: 10.1016/j.cej.2021.130879 Kanghee Cho , Donyoung Kang , Hyungsuk Lee , Won-Gun Koh
|
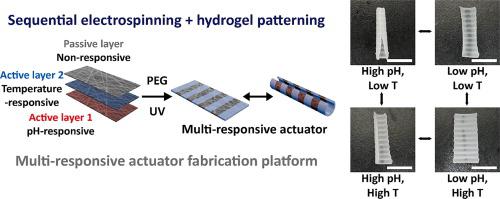
Soft actuators enable the motion of soft materials such as living organisms, biomaterials, and flexible materials in environments where multiple stimuli are simultaneously present. Although various fast, reversible, and direction-guided actuators exist, their material and structural complexity hinder the construction of a simple fabrication platform for actuators responsive to various environmental conditions with reversible and controlled actuation dynamics. We propose an engineered multi-responsive actuator fabrication platform by combining electrospinning and hydrogel lithography techniques. The fabricated soft actuator is composed of stimuli-responsive hydrogel fibers as an active layer, non-responsive fibers as a passive layer, and a micropatterned hydrogel coupling layer to combine those layers. We demonstrate the reversible bending and unbending of the actuator in response to changes in pH and temperature for less than 2 min. The computational modeling is used to elucidate the bending mechanism of the layered actuator and obtain the key parameters to determine its characteristics. The bending direction is regulated by modulating the mechanical properties of the actuator materials and dimensions of hydrogel micropatterns. The fabrication process is versatile and multi-responsive actuation is achieved by adding another active fiber layer without modifying it. Our study provides an insight into the design of a stimulus-specific, multi-scale, multi-functional soft actuator.
中文翻译:
由分层纤维基质和水凝胶微图案设计的多刺激响应和可逆软致动器
软致动器使软材料(例如活生物体、生物材料和柔性材料)能够在同时存在多种刺激的环境中运动。尽管存在各种快速、可逆和方向引导的致动器,但它们的材料和结构复杂性阻碍了用于响应各种环境条件且具有可逆和受控致动动力学的致动器的简单制造平台的构建。我们通过结合静电纺丝和水凝胶光刻技术提出了一种工程化的多响应执行器制造平台。制造的软致动器由作为活性层的刺激响应水凝胶纤维、作为被动层的非响应纤维和用于组合这些层的微图案水凝胶耦合层组成。我们展示了执行器在不到 2 分钟的时间内响应 pH 值和温度变化的可逆弯曲和伸直。计算建模用于阐明分层致动器的弯曲机制并获得确定其特性的关键参数。通过调节致动器材料的机械性能和水凝胶微图案的尺寸来调节弯曲方向。制造过程是通用的,多响应驱动是通过添加另一个有源纤维层而不对其进行修改来实现的。我们的研究提供了对刺激特异性、多尺度、多功能软执行器设计的深入了解。计算建模用于阐明分层致动器的弯曲机制并获得确定其特性的关键参数。通过调节致动器材料的机械性能和水凝胶微图案的尺寸来调节弯曲方向。制造过程是通用的,多响应驱动是通过添加另一个有源纤维层而不对其进行修改来实现的。我们的研究提供了对刺激特异性、多尺度、多功能软执行器设计的深入了解。计算建模用于阐明分层致动器的弯曲机制并获得确定其特性的关键参数。通过调节致动器材料的机械性能和水凝胶微图案的尺寸来调节弯曲方向。制造过程是通用的,多响应驱动是通过添加另一个有源纤维层而不对其进行修改来实现的。我们的研究提供了对刺激特异性、多尺度、多功能软执行器设计的深入了解。制造过程是通用的,多响应驱动是通过添加另一个有源纤维层而不对其进行修改来实现的。我们的研究提供了对刺激特异性、多尺度、多功能软执行器设计的深入了解。制造过程是通用的,多响应驱动是通过添加另一个有源纤维层而不对其进行修改来实现的。我们的研究提供了对刺激特异性、多尺度、多功能软执行器设计的深入了解。









































 京公网安备 11010802027423号
京公网安备 11010802027423号