Medical & Biological Engineering & Computing ( IF 3.2 ) Pub Date : 2021-06-22 , DOI: 10.1007/s11517-021-02369-z Zihao Li 1 , Xing Yang 1 , Shuang Song 1 , Li Liu 2 , Max Q-H Meng 3
|
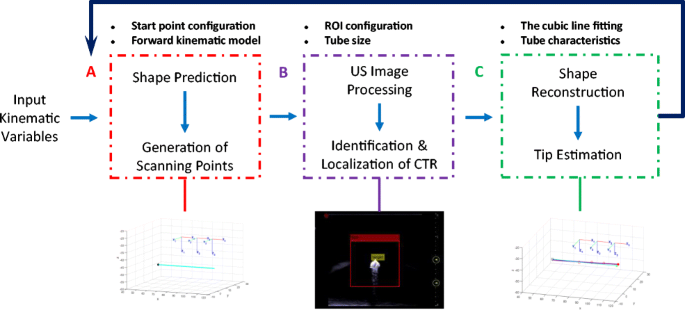
Concentric tube robot (CTR) is an efficient approach for minimally invasive surgery (MIS) and diagnosis due to its small size and high dexterity. To manipulate the robot accurately and safely inside the human body, tip position and shape information need to be well measured. In this paper, we propose a tip estimation method based on 2D ultrasound images with the help of the forward kinematic model of CTR. The forward kinematic model can help to provide a fast ultrasound scanning path and narrow the region of interest in ultrasound images. For each tube, only three scan positions are needed by combining the kinematic model prediction as prior knowledge. After that, the curve fitting method is used for its shape reconstruction, while its tip position can be estimated based on the constraints of its structure and length.7 This method provides the advantage that only three scan positions are needed for estimating the tip of each telescoping section. Moreover, no structure modification is needed on the robot, which makes it an appropriate approach for existing flexible surgical robots. Experimental results verified the feasibility of the proposed method and the tip estimation error is 0.59 mm.
中文翻译:
使用二维超声图像和运动学模型的同心管机器人尖端估计方法
同心管机器人(CTR)体积小、灵活性高,是一种有效的微创手术(MIS)和诊断方法。为了在人体内准确安全地操纵机器人,需要很好地测量尖端位置和形状信息。在本文中,我们借助 CTR 的正向运动学模型提出了一种基于 2D 超声图像的尖端估计方法。正向运动学模型可以帮助提供快速的超声扫描路径并缩小超声图像中的感兴趣区域。对于每个管,通过结合运动学模型预测作为先验知识,只需要三个扫描位置。之后,利用曲线拟合的方法对其进行形状重建,同时根据其结构和长度的约束来估计其尖端位置。7 这种方法的优点是只需要三个扫描位置来估计每个伸缩部分的尖端。此外,不需要对机器人进行结构修改,这使其成为现有柔性手术机器人的合适方法。实验结果验证了该方法的可行性,尖端估计误差为0.59 mm。


























 京公网安备 11010802027423号
京公网安备 11010802027423号