Robotics and Computer-Integrated Manufacturing ( IF 9.1 ) Pub Date : 2021-06-18 , DOI: 10.1016/j.rcim.2021.102206 Fusheng Liang , Chengwei Kang , Zhongyang Lu , Fengzhou Fang
|
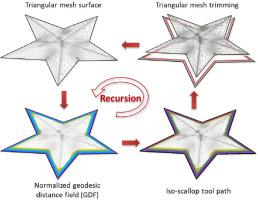
Triangular mesh enables the flexible construction of complex surface geometry and has become a general representation of 3D objects in computer graphics. However, the creation of a tool path with constant residual scallop height on triangular mesh surfaces in multi-axis machining is not a convenient task for current algorithms. In this study, an isoscallop tool path planning method for triangular mesh surfaces, in which the tool path is derived directly from the contours of a normalized geodesic distance field (GDF), without any post-processing is proposed. First, the GDF is built to determine the shortest geodesic distance from each vertex to the mesh boundary. Then, the normalizing process is performed on the GDF to ensure that its first contour meets the isoscallop height requirement considering the mesh curvature and effective cutter radius. To improve the computational efficiency, the GDF is only built in the mesh area related to the first contour by specifying a stop distance. Moreover, an adaptive refinement process is conducted on the mesh to improve the smoothness and accuracy of the tool path. Finally, the triangular mesh is trimmed along this first contour for a new round of tool path planning. The proposed method is organized recursively and terminated when no new paths are generated. Simulations and experiments are conducted to verify the effectiveness and superiority of the proposed tool path planning method.
中文翻译:
多轴加工中三角形网格曲面的等值扇贝刀路径规划
三角网格可以灵活构建复杂的表面几何形状,并已成为计算机图形中 3D 对象的一般表示。然而,在多轴加工中在三角形网格表面上创建具有恒定残余扇形高度的刀具路径对于当前算法来说不是一项方便的任务。在这项研究中,提出了一种三角形网格表面的等腰扇形刀具路径规划方法,其中刀具路径直接从归一化测地距离场 (GDF) 的轮廓导出,无需任何后处理。首先,建立 GDF 以确定从每个顶点到网格边界的最短测地距离。然后,对 GDF 进行归一化处理,以确保考虑到网格曲率和有效刀具半径,其第一个轮廓满足等瓣高度要求。为了提高计算效率,GDF 仅通过指定停止距离在与第一个轮廓相关的网格区域中构建。此外,对网格进行了自适应细化处理,以提高刀具路径的平滑度和精度。最后,沿着第一个轮廓修剪三角形网格,以进行新一轮的刀具路径规划。所提出的方法是递归组织的,并在没有生成新路径时终止。进行仿真和实验以验证所提出的刀具路径规划方法的有效性和优越性。三角形网格沿着第一个轮廓修剪,以进行新一轮的刀具路径规划。所提出的方法是递归组织的,并在没有生成新路径时终止。进行仿真和实验以验证所提出的刀具路径规划方法的有效性和优越性。三角形网格沿着第一个轮廓修剪,以进行新一轮的刀具路径规划。所提出的方法是递归组织的,并在没有生成新路径时终止。进行仿真和实验以验证所提出的刀具路径规划方法的有效性和优越性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号