Archive of Applied Mechanics ( IF 2.2 ) Pub Date : 2021-06-18 , DOI: 10.1007/s00419-021-02002-3 Mohammad Reza Salehi Kolahi , Mohammad Reza Gharib , Ali Koochi
|
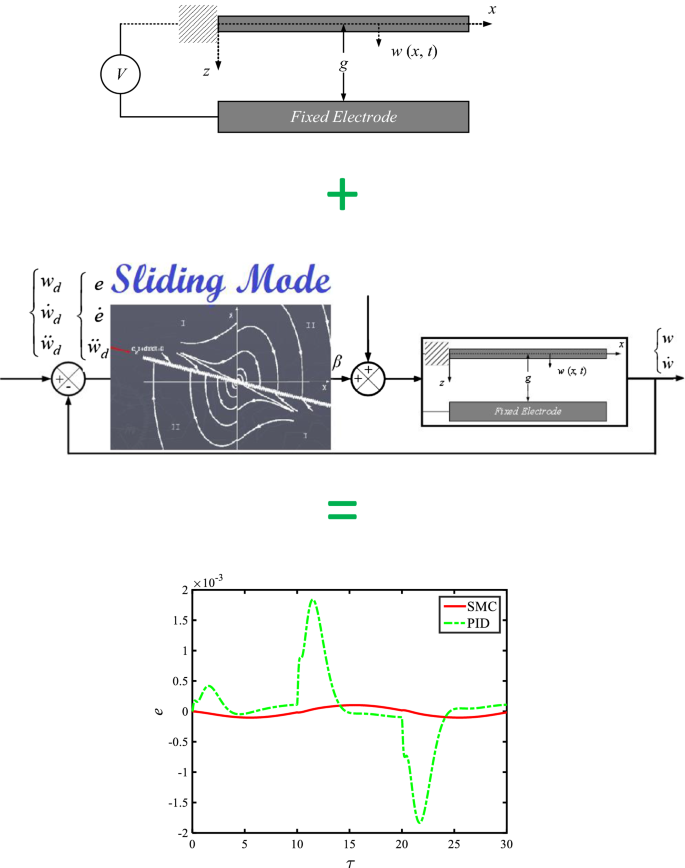
In this paper, attention was given to position control and path tracking of cantilever micro/nano-positioners subjected to Casimir force within and beyond the pull-in range. The material size dependency was incorporated in the model based on the modified couple stress theory. Using single-mode assumption, the system’s governing nonlinear partial differential equation (PDE) was transformed into a nonlinear state-space form. To verify the mathematical model, open-loop oscillations and the pull-in parameters were compared with the finite element simulation as well as experimental data. A robust non-singular terminal sliding mode controller with finite time convergence was designed to overcome the extending traveling rang problem in the presence of external disturbance. Finally, to compare the performance of the proposed controller, an optimal proportional integral derivative (PID) controller is designed and applied to the system. The achievements demonstrate that the designed controller can stabilize the system within and beyond the pull-in range without any fluctuation.
Graphic abstract
中文翻译:
在存在 Casimir 力和外部干扰的情况下,设计用于路径跟踪和超越微/纳米定位器拉入稳定的鲁棒控制方案
在本文中,关注在拉入范围内外受到卡西米尔力的悬臂微/纳米定位器的位置控制和路径跟踪。材料尺寸相关性被纳入基于修正偶应力理论的模型中。使用单模假设,系统的控制非线性偏微分方程 (PDE) 被转换为非线性状态空间形式。为了验证数学模型,将开环振荡和牵引参数与有限元模拟以及实验数据进行了比较。设计了一种具有有限时间收敛性的鲁棒非奇异终端滑模控制器,以克服在存在外部干扰的情况下扩展行进范围的问题。最后,为了比较所提出的控制器的性能,设计了一个最优比例积分微分 (PID) 控制器并应用于该系统。结果表明,所设计的控制器可以在引入范围内外稳定系统而没有任何波动。










































 京公网安备 11010802027423号
京公网安备 11010802027423号