Materials Today ( IF 21.1 ) Pub Date : 2021-06-17 , DOI: 10.1016/j.mattod.2021.05.008 Chiao-Yueh Lo , Yusen Zhao , Cheolgyu Kim , Yousif Alsaid , Roozbeh Khodambashi , Matthew Peet , Rebecca Fisher , Hamid Marvi , Spring Berman , Daniel Aukes , Ximin He
|
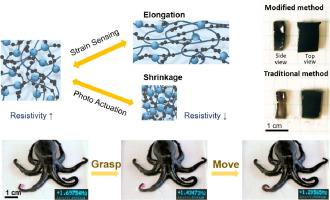
Soft robots built with active soft materials have been increasingly attractive. Despite tremendous efforts in soft sensors and actuators, it remains extremely challenging to construct intelligent soft materials that simultaneously actuate and sense their own motions, resembling living organisms’ neuromuscular behaviors. This work presents a soft robotic strategy that couples actuation and strain-sensing into a single homogeneous material, composed of an interpenetrating double-network of a nanostructured thermo-responsive hydrogel poly(N-isopropylacrylamide) (PNIPAAm) and a light-absorbing, electrically conductive polymer polypyrrole (PPy). This design grants the material both photo/thermal-responsiveness and piezoresistive-responsiveness, enabling remotely-triggered actuation and local strain-sensing. This self-sensing actuating soft material demonstrated ultra-high stretchability (210%) and large volume shrinkage (70%) rapidly upon irradiation or heating (13%/°C, 6-time faster than conventional PNIPAAm). The significant deswelling of the hydrogel network induces densification of percolation in the PPy network, leading to a drastic conductivity change upon locomotion with a gauge factor of 1.0. The material demonstrated a variety of precise and remotely-driven photo-responsive locomotion such as signal-tracking, bending, weightlifting, object grasping and transporting, while simultaneously monitoring these motions itself via real-time resistance change. The multifunctional sensory actuatable materials may lead to the next-generation soft robots of higher levels of autonomy and complexity with self-diagnostic feedback control.
中文翻译:
基于导电光热响应水凝胶的高度可拉伸自感执行器
用活性软材料制造的软机器人越来越有吸引力。尽管在软传感器和执行器方面做出了巨大的努力,但构建能够同时驱动和感知自身运动的智能软材料仍然极具挑战性,类似于生物体的神经肌肉行为。这项工作提出了一种软机器人策略,将驱动和应变传感耦合到单一的均质材料中,由纳米结构热响应水凝胶聚(N-异丙基丙烯酰胺)(PNIPAAm)的互穿双网络和吸光、电导电聚合物聚吡咯 (PPy)。这种设计赋予材料光/热响应性和压阻响应性,实现远程触发驱动和局部应变传感。这种自感应驱动软材料在辐照或加热(13%/°C,比传统 PNIPAAm 快 6 倍)时表现出超高的拉伸性 (210%) 和大体积收缩 (70%)。水凝胶网络的显着消溶胀导致 PPy 网络中渗透的致密化,导致在运动时电导率发生剧烈变化,应变系数为 1.0。该材料展示了各种精确和远程驱动的光响应运动,如信号跟踪、弯曲、举重、物体抓取和运输,同时通过实时阻力变化监测这些运动本身。多功能感官驱动材料可能会导致具有更高水平自主性和复杂性的下一代软机器人,具有自我诊断反馈控制。










































 京公网安备 11010802027423号
京公网安备 11010802027423号