当前位置:
X-MOL 学术
›
Int. J. Numer. Method. Biomed. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Influence of parameter deviation on the closeness of the tibial limb and external fixator based on a novel collision detection algorithm
International Journal for Numerical Methods in Biomedical Engineering ( IF 2.1 ) Pub Date : 2021-06-10 , DOI: 10.1002/cnm.3502 Guotong Li 1 , Jianfeng Li 1 , Shiping Zuo 1 , Mingjie Dong 1
International Journal for Numerical Methods in Biomedical Engineering ( IF 2.1 ) Pub Date : 2021-06-10 , DOI: 10.1002/cnm.3502 Guotong Li 1 , Jianfeng Li 1 , Shiping Zuo 1 , Mingjie Dong 1
Affiliation
|
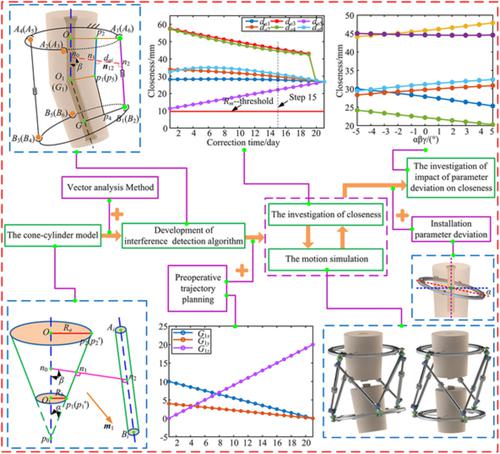
The Ortho-SUV frame (OSF) is a hexapod external fixator widely applied in orthopedics deformity correction. The possibility of collision between OSF's struts and the soft tissue is an essential but overlooked issue. To avoid the issue, a novel collision detection algorithm is established based on a cone-cylinder model of the tibial limb-strut interaction for detecting the closeness of the tibial limb and external fixator. The algorithm is constructed using the vector analysis based on the model of the minimum distance between the truncated cone generatrix and the cylinder axis. The motion simulation is performed on the overall alignment through the Solidworks-motion module to verify the feasibility of the algorithm. Subsequently, the installation parameter deviations of the bone-fixator system are described to investigate the influence of orientation and position deviation on the closeness of the tibial limb and external fixator through the numerical method. The investigation results show that the orientation deviation γ (around the z-axis), the position deviation τ1 and τ2 (along the x and y-axes, respectively) have greater sensitivity to closeness and the influence of multiple deviations on the closeness has the property of superposition. The proposed algorithm can assist clinicians to strictly design and appraise frame configurations prior to their application to avoid the collision between the external fixator and the limbs during the correction. It has great application significance in the development of computer-aided correction software.
中文翻译:

基于新型碰撞检测算法的参数偏差对胫骨与外固定架贴合度的影响
Ortho-SUV 框架(OSF)是一种广泛应用于骨科畸形矫正的六足外固定架。OSF 的支柱和软组织之间发生碰撞的可能性是一个基本但被忽视的问题。为避免该问题,基于胫骨-支柱相互作用的锥柱模型建立了一种新颖的碰撞检测算法,用于检测胫骨与外固定器的接近度。该算法是基于截锥母线与圆柱轴之间的最小距离模型,利用矢量分析构建的。通过Solidworks-motion模块对整体对齐进行运动模拟,验证算法的可行性。随后,描述骨-固定器系统的安装参数偏差,通过数值方法研究方向和位置偏差对胫骨与外固定器贴合度的影响。调查结果表明,方向偏差γ(围绕z轴),位置偏差τ 1和τ 2(分别沿x和y轴)对接近度具有更大的敏感性,并且多次偏差对接近度的影响具有叠加特性。所提出的算法可以帮助临床医生在应用前严格设计和评估框架配置,以避免在矫正过程中外固定器与肢体之间的碰撞。在计算机辅助校正软件的开发中具有重要的应用意义。
更新日期:2021-07-14
中文翻译:
基于新型碰撞检测算法的参数偏差对胫骨与外固定架贴合度的影响
Ortho-SUV 框架(OSF)是一种广泛应用于骨科畸形矫正的六足外固定架。OSF 的支柱和软组织之间发生碰撞的可能性是一个基本但被忽视的问题。为避免该问题,基于胫骨-支柱相互作用的锥柱模型建立了一种新颖的碰撞检测算法,用于检测胫骨与外固定器的接近度。该算法是基于截锥母线与圆柱轴之间的最小距离模型,利用矢量分析构建的。通过Solidworks-motion模块对整体对齐进行运动模拟,验证算法的可行性。随后,描述骨-固定器系统的安装参数偏差,通过数值方法研究方向和位置偏差对胫骨与外固定器贴合度的影响。调查结果表明,方向偏差γ(围绕z轴),位置偏差τ 1和τ 2(分别沿x和y轴)对接近度具有更大的敏感性,并且多次偏差对接近度的影响具有叠加特性。所提出的算法可以帮助临床医生在应用前严格设计和评估框架配置,以避免在矫正过程中外固定器与肢体之间的碰撞。在计算机辅助校正软件的开发中具有重要的应用意义。


























 京公网安备 11010802027423号
京公网安备 11010802027423号