Journal of Terramechanics ( IF 2.4 ) Pub Date : 2021-06-11 , DOI: 10.1016/j.jterra.2021.05.001 Jamal Mrazgua , Redouane Chaibi , El Houssaine Tissir , Mohamed Ouahi
|
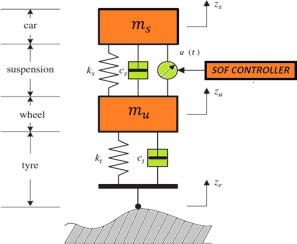
This paper investigates, a new methodology for non-linear active suspension systems (ASS) with static output feedback (SOF) control. The nonlinear ASS is represented by a Takagi–Sugeno fuzzy control ASS in continuous time. A SOF control presented by a family of linear matrix inequalities (LMIs) guarantees the asymptotic stability and ensures certain an performance level. This methodology motivated this research, where in the context of active suspension (AS) systems, the guaranteed performance correspond to ride comfort in the presence of road disturbances. Thus, a controller is developed for a quarter-car model with active suspension. The Simulated results with root-mean-square (RMS) values illustrate the effectiveness of the proposed approach.
中文翻译:
TS模糊主动悬架系统的静态输出反馈稳定
本文研究了一种具有静态输出反馈 (SOF) 控制的非线性主动悬架系统 (ASS) 的新方法。非线性 ASS 由连续时间的 Takagi-Sugeno 模糊控制 ASS 表示。由一系列线性矩阵不等式 (LMI) 提供的 SOF 控制保证渐近稳定性并确保某些性能水平。这种方法激发了这项研究,在主动悬架 (AS) 系统的背景下,保证的性能对应于存在道路干扰时的乘坐舒适性。因此,为具有主动悬架的四分之一汽车模型开发了控制器。具有均方根 (RMS) 值的模拟结果说明了所提出方法的有效性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号