当前位置:
X-MOL 学术
›
Int. J. Circ. Theory Appl.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Fine resolution smart force sensor based on lever arm mechanism using shape memory alloy spring
International Journal of Circuit Theory and Applications ( IF 1.8 ) Pub Date : 2021-06-09 , DOI: 10.1002/cta.3080 Then Mozhi G. 1 , Banu Sundareswari M. 1 , Dhanalakshmi K. 1
International Journal of Circuit Theory and Applications ( IF 1.8 ) Pub Date : 2021-06-09 , DOI: 10.1002/cta.3080 Then Mozhi G. 1 , Banu Sundareswari M. 1 , Dhanalakshmi K. 1
Affiliation
|
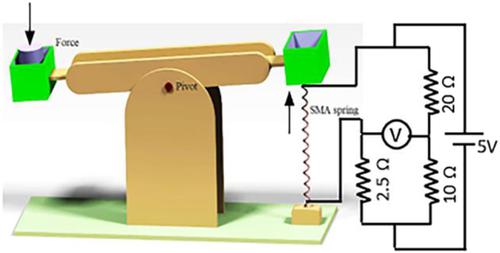
A novel force measurement technique using the variable resistance property of shape memory alloy (SMA) spring is presented. The unique abilities of SMA, a smart material make it a potential candidate to construct actuators and dampers and of late is added to the domain of sensing technology in the design of creative sensing systems. The sensing mechanism is realized using a lever arm made of less stiff acrylic material; one of the links of the lever arm is integrated with an SMA spring actuator that is connected perpendicular to the stationary base, and the unknown load is placed at the other link; the force due to the measurand and the transmitted force act on the arms of the lever. The displacement due to the application of force on one of the flexible arms causes a variation in the strain that leads to resistance variation of the Joule-heated SMA spring attached at the other arm. The active sensor possesses static and dynamic sensing capabilities and can detect force in the range of a few millinewtons, and the sensor design is validated from the experimental measurements and analytical results. The performance of the sensor is evaluated from its static and dynamic characteristics and depicts promising results. The design methodology of the sensor mechanism and selection of material suitable to offer flexible transformation of force leads to the development of a force sensor with fine resolution.
中文翻译:

基于使用形状记忆合金弹簧的杠杆臂机构的高分辨率智能力传感器
提出了一种利用形状记忆合金 (SMA) 弹簧的可变电阻特性的新型力测量技术。SMA(一种智能材料)的独特能力使其成为构建执行器和阻尼器的潜在候选材料,并且最近在创造性传感系统的设计中被添加到传感技术领域。传感机制是使用由硬度较低的亚克力材料制成的杠杆臂实现的;杠杆臂的其中一个连杆与垂直于固定底座连接的SMA弹簧致动器集成在一起,未知负载放置在另一个连杆上;被测量产生的力和传递的力作用在杠杆臂上。由于在一个柔性臂上施加力而产生的位移导致应变的变化,从而导致连接在另一个臂上的焦耳加热 SMA 弹簧的电阻变化。主动传感器具有静态和动态传感能力,可以检测几毫牛顿范围内的力,传感器设计从实验测量和分析结果中得到验证。传感器的性能从其静态和动态特性进行评估,并描绘出有希望的结果。传感器机构的设计方法和适合提供灵活力转换的材料的选择导致了具有高分辨率的力传感器的开发。主动传感器具有静态和动态传感能力,可以检测几毫牛顿范围内的力,传感器设计从实验测量和分析结果中得到验证。传感器的性能从其静态和动态特性进行评估,并描绘出有希望的结果。传感器机构的设计方法和适合提供灵活力转换的材料的选择导致了具有高分辨率的力传感器的开发。主动传感器具有静态和动态传感能力,可以检测几毫牛顿范围内的力,传感器设计从实验测量和分析结果中得到验证。传感器的性能从其静态和动态特性进行评估,并描绘出有希望的结果。传感器机构的设计方法和适合提供灵活力转换的材料的选择导致了具有高分辨率的力传感器的开发。
更新日期:2021-06-09
中文翻译:
基于使用形状记忆合金弹簧的杠杆臂机构的高分辨率智能力传感器
提出了一种利用形状记忆合金 (SMA) 弹簧的可变电阻特性的新型力测量技术。SMA(一种智能材料)的独特能力使其成为构建执行器和阻尼器的潜在候选材料,并且最近在创造性传感系统的设计中被添加到传感技术领域。传感机制是使用由硬度较低的亚克力材料制成的杠杆臂实现的;杠杆臂的其中一个连杆与垂直于固定底座连接的SMA弹簧致动器集成在一起,未知负载放置在另一个连杆上;被测量产生的力和传递的力作用在杠杆臂上。由于在一个柔性臂上施加力而产生的位移导致应变的变化,从而导致连接在另一个臂上的焦耳加热 SMA 弹簧的电阻变化。主动传感器具有静态和动态传感能力,可以检测几毫牛顿范围内的力,传感器设计从实验测量和分析结果中得到验证。传感器的性能从其静态和动态特性进行评估,并描绘出有希望的结果。传感器机构的设计方法和适合提供灵活力转换的材料的选择导致了具有高分辨率的力传感器的开发。主动传感器具有静态和动态传感能力,可以检测几毫牛顿范围内的力,传感器设计从实验测量和分析结果中得到验证。传感器的性能从其静态和动态特性进行评估,并描绘出有希望的结果。传感器机构的设计方法和适合提供灵活力转换的材料的选择导致了具有高分辨率的力传感器的开发。主动传感器具有静态和动态传感能力,可以检测几毫牛顿范围内的力,传感器设计从实验测量和分析结果中得到验证。传感器的性能从其静态和动态特性进行评估,并描绘出有希望的结果。传感器机构的设计方法和适合提供灵活力转换的材料的选择导致了具有高分辨率的力传感器的开发。










































 京公网安备 11010802027423号
京公网安备 11010802027423号