当前位置:
X-MOL 学术
›
Comput. Animat. Virtual Worlds
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Generation of multiagent animation for object transportation using deep reinforcement learning and blend-trees
Computer Animation and Virtual Worlds ( IF 0.9 ) Pub Date : 2021-06-04 , DOI: 10.1002/cav.2017 Shao-Chieh Chen, Guan-Ting Liu, Sai-Keung Wong
Computer Animation and Virtual Worlds ( IF 0.9 ) Pub Date : 2021-06-04 , DOI: 10.1002/cav.2017 Shao-Chieh Chen, Guan-Ting Liu, Sai-Keung Wong
|
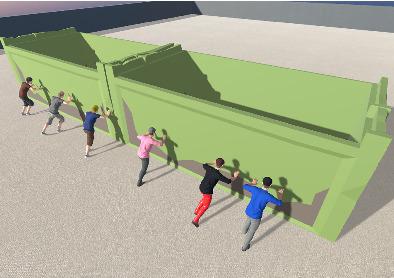
This paper proposes a framework that integrates reinforcement learning and blend-trees to generate animation of multiple agents for object transportation. The main idea is that in the learning stage, policies are learned to control agents to perform specific skills, including navigation, pushing, and orientation adjustment. The policies determine the blending parameters of the blend-trees to achieve locomotion control of the agents. In the simulation stage, the policies are combined to control the agents to navigate, push objects, and adjust orientation of the objects. We demonstrated several examples to show that the framework is capable of generating animation of multiple agents in different scenarios.
中文翻译:

使用深度强化学习和混合树为物体运输生成多智能体动画
本文提出了一个集成强化学习和混合树的框架,以生成用于对象运输的多个代理的动画。主要思想是在学习阶段,学习策略来控制代理执行特定技能,包括导航、推动和方向调整。策略确定混合树的混合参数以实现代理的运动控制。在模拟阶段,结合策略来控制代理导航、推送对象和调整对象的方向。我们演示了几个示例,以表明该框架能够在不同场景下生成多个代理的动画。
更新日期:2021-07-12
中文翻译:
使用深度强化学习和混合树为物体运输生成多智能体动画
本文提出了一个集成强化学习和混合树的框架,以生成用于对象运输的多个代理的动画。主要思想是在学习阶段,学习策略来控制代理执行特定技能,包括导航、推动和方向调整。策略确定混合树的混合参数以实现代理的运动控制。在模拟阶段,结合策略来控制代理导航、推送对象和调整对象的方向。我们演示了几个示例,以表明该框架能够在不同场景下生成多个代理的动画。










































 京公网安备 11010802027423号
京公网安备 11010802027423号