Computers and Electronics in Agriculture ( IF 7.7 ) Pub Date : 2021-06-02 , DOI: 10.1016/j.compag.2021.106231 Daniel Dooyum Uyeh , Trinadh Pamulapati , Rammohan Mallipeddi , Tusan Park , Seungmin Woo , Siyoung Lee , Jongwon Lee , Yushin Ha
|
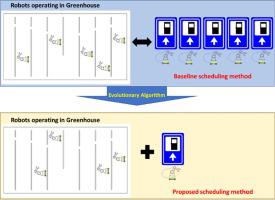
The protected cultivation system, an alternative to open field cultivation provides opportunities such as year-round crop production and improved food security especially during disasters as well as ease in automation. However, protected cultivation is limited by the hazardous work environments and skilled labor shortages thus necessitating robotic applications. Robots are mostly battery-powered, requiring regular charges depending on the task. In a multi-robot system, due to the limitation on the availability of charging infrastructure and uneven discharge rates of the robots depending on the task, it is very difficult to predict when the robots would require charging. Therefore, to maximize the continuous work time of the robots, optimal scheduling is required. Consequently, we propose a novel system for efficiently utilizing mobile robotic systems in protected cultivation by developing a scheduling system that maximizes work time and minimizes concentrated energy demand. We formulated the robot scheduling problem to evaluate battery charge state regularly and optimally send the robot to the charging station. This problem was solved using an evolutionary algorithm. We considered: a) the number of available robots; b) number of charging stations; c) required work hours; d) robot battery capacity; e) robot battery charge and discharge rates; and f) the number of continuous discharge time instances. All parameters could be set to user preference. The applicability of the proposed method was demonstrated with experimental simulations using MATLAB under different cases and scenarios. These cases and scenarios demonstrated that our proposed system maximized worktime by a significant percentage and minimized the required power to charge the batteries in all situations.
中文翻译:
保护栽培系统中机器人调度的进化方法,以实现不间断和最大化工作时间
受保护的耕作系统是露天耕作的替代方案, 它提供了 诸如全年 作物 生产 和改善粮食安全(尤其是在灾害期间) 以及 易于自动化等方面的机会。然而,保护地栽培限于 通过 危险的工作环境和熟练劳动力的短缺从而 迫使 机器人应用。 机器人大多由电池供电,需要根据任务定期充电。在多机器人系统中,由于充电基础设施可用性的限制和机器人根据任务的不均匀放电率,很难预测机器人何时需要充电。因此,为了最大化机器人的连续工作时间,需要优化调度。因此,我们提出了一种新颖的系统,通过开发一种可最大限度地延长工作时间并最大限度地减少集中能源需求的调度系统,在保护栽培中有效利用 移动 机器人系统。我们制定了机器人调度问题来评估电池充电状态 定期并以最佳方式将机器人送到 充电站。这个问题是使用进化算法解决的。 我们考虑了: a) 可用机器人的数量;b) 充电站数量;c) 要求的工作时间; d) 机器人电池容量;e) 机器人 电池充放电率;f) 连续放电的次数。 所有参数都可以设置为用户 偏好。 使用MATLAB在不同条件下的实验仿真证明了所提出方法的适用性。 案例和场景。这些案例和场景表明,我们提出的系统将工作时间最大化了很大一部分,并在所有情况下最小化了电池充电所需的功率。










































 京公网安备 11010802027423号
京公网安备 11010802027423号