当前位置:
X-MOL 学术
›
Comput. Animat. Virtual Worlds
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Spatial semantic graph enhanced monocular SLAM System
Computer Animation and Virtual Worlds ( IF 0.9 ) Pub Date : 2021-05-28 , DOI: 10.1002/cav.2025 Zezi Xu 1 , Shuangjiu Xiao 1
Computer Animation and Virtual Worlds ( IF 0.9 ) Pub Date : 2021-05-28 , DOI: 10.1002/cav.2025 Zezi Xu 1 , Shuangjiu Xiao 1
Affiliation
|
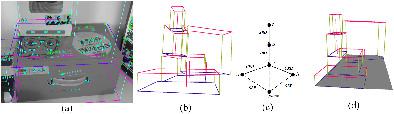
More and more applications require accurate estimation of objects' poses. For example, Augmented Reality (AR) needs that for interactions among virtual and real objects. However, recent object-level Simultaneous Localization and Mapping (SLAM) systems care more about trajectories than poses of objects. So, in this paper, we present SSG SLAM: a monocular SLAM system based on Spatial Semantic Graph (SSG), leveraging spatial relations to achieve good estimation of objects' poses. First, we put forward the design of SSG to organize objects and their spatial relations. Then, SSG is utilized in a monocular object SLAM and new constraints are proposed based on spatial relations. Finally, experimental evaluations performed on SSG-Dataset show that our approach outperforms the baseline object SLAM system, as well as providing visual consistency in an AR demo.
中文翻译:

空间语义图增强单目SLAM系统
越来越多的应用需要准确估计物体的姿态。例如,增强现实 (AR) 需要它来实现虚拟和真实对象之间的交互。然而,最近的对象级同步定位和映射 (SLAM) 系统更关心轨迹而不是对象的姿态。因此,在本文中,我们提出了 SSG SLAM:一种基于空间语义图 (SSG) 的单目 SLAM 系统,利用空间关系来实现对物体姿态的良好估计。首先,我们提出了 SSG 的设计来组织对象及其空间关系。然后,在单目物体 SLAM 中利用 SSG,并基于空间关系提出新的约束。最后,对 SSG-Dataset 进行的实验评估表明,我们的方法优于基线对象 SLAM 系统,
更新日期:2021-07-12
中文翻译:
空间语义图增强单目SLAM系统
越来越多的应用需要准确估计物体的姿态。例如,增强现实 (AR) 需要它来实现虚拟和真实对象之间的交互。然而,最近的对象级同步定位和映射 (SLAM) 系统更关心轨迹而不是对象的姿态。因此,在本文中,我们提出了 SSG SLAM:一种基于空间语义图 (SSG) 的单目 SLAM 系统,利用空间关系来实现对物体姿态的良好估计。首先,我们提出了 SSG 的设计来组织对象及其空间关系。然后,在单目物体 SLAM 中利用 SSG,并基于空间关系提出新的约束。最后,对 SSG-Dataset 进行的实验评估表明,我们的方法优于基线对象 SLAM 系统,










































 京公网安备 11010802027423号
京公网安备 11010802027423号