International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2021-05-20 , DOI: 10.1016/j.ijmecsci.2021.106535 Haonan He , Yuan Li , Jason Zheng Jiang , Steve Burrow , Simon Neild , Andrew Conn
|
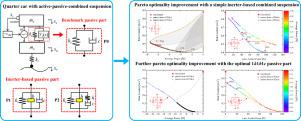
Performance of a passive vehicle suspension can be improved with the help of an active actuator, however, with potentially problematic control requirements, such as high energy consumption and large actuator forces. To maximize performance benefits without requiring significant control efforts, the passive and active parts need to be designed and work synergistically. In this paper, a novel combined passive and active vibration suppression approach of which the passive part is enhanced by an inerter is proposed for improving the trade-off between dynamic performance and control requirements. Via this approach, the optimal passive configuration consisting of inerter(s), spring(s) and damper(s) with pre-determined numbers and the optimal active control parameter can be identified. The approach is demonstrated using a case study where the combined suspension is designed considering a quarter-car model and a typical active controller (i.e., the skyhook control). It will be shown that, compared with a conventional passive part of a spring-damper, adding an inerter in parallel can significantly improve the pareto optimality between the ride comfort and power (or force) requirements. The improvement is further enhanced by systematically exploring all passive network possibilities with a pre-determined complexity via the structure-immittance technique. This approach is also applicable to the vibration suppression of other engineering structures.
中文翻译:
使用惰化器增强主动-被动组合的车辆悬架系统
在主动致动器的帮助下,可以提高被动车辆悬架的性能,但是,可能存在控制要求问题,例如高能耗和大致动器力。为了在不需要大量控制工作的情况下最大限度地提高性能,需要设计被动部件和主动部件并协同工作。在本文中,为了改善动态性能和控制要求之间的权衡,提出了一种新型的被动和主动组合振动抑制方法,其被动部分通过惰化器增强。通过这种方法,可以识别由具有预定数量的惰性件、弹簧和阻尼器以及最佳主动控制参数组成的最佳被动配置。该方法通过一个案例研究来演示,其中组合悬架的设计考虑了四分之一汽车模型和典型的主动控制器(即天棚控制)。将表明,与传统的弹簧减振器被动部件相比,并联添加惰轮可以显着提高乘坐舒适性和功率(或力)要求之间的帕累托最优性。通过结构导抗技术系统地探索具有预定复杂性的所有无源网络可能性,进一步增强了改进。这种方法也适用于其他工程结构的振动抑制。与传统的弹簧减振器被动部分相比,并联增加一个惰化器可以显着提高乘坐舒适性和功率(或力)要求之间的帕累托最优性。通过结构导抗技术系统地探索具有预定复杂性的所有无源网络可能性,进一步增强了改进。这种方法也适用于其他工程结构的振动抑制。与传统的弹簧减振器被动部分相比,并联增加一个惰化器可以显着提高乘坐舒适性和功率(或力)要求之间的帕累托最优性。通过结构导抗技术系统地探索具有预定复杂性的所有无源网络可能性,进一步增强了改进。这种方法也适用于其他工程结构的振动抑制。










































 京公网安备 11010802027423号
京公网安备 11010802027423号