当前位置:
X-MOL 学术
›
Microsc. Res. Tech.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Path planning in three dimensional live environment with randomly moving obstacles for viscoelastic bio-particle
Microscopy Research and Technique ( IF 2.0 ) Pub Date : 2021-05-11 , DOI: 10.1002/jemt.23767 Moharam Habibnejad Korayem 1 , Zahra Rastegar 1
Microscopy Research and Technique ( IF 2.0 ) Pub Date : 2021-05-11 , DOI: 10.1002/jemt.23767 Moharam Habibnejad Korayem 1 , Zahra Rastegar 1
Affiliation
|
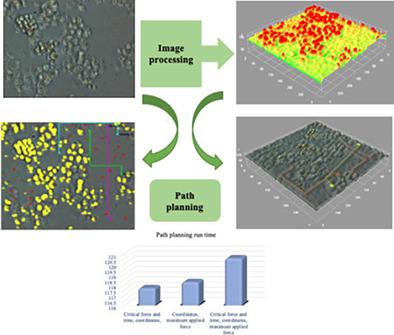
Significant capabilities of atomic force microscopy (AFM) such as operating in various environments and scales made it a useful device in different operations. According to AFM abilities and applications, in this work, the path through the live environment with fixed and moving obstacles that are distributed all over the space randomly has been provided. The optimized path has been discovered in this article based on the applications mentioned above. Since for biological applications, the tool's accuracy plays an important role in success and reliability of the operation, in this article, the cost function is defined as combination of the tool's error, the maximum applied force on the tool, and the maximum deformation of the particle to be minimized. In this regard, constraints which limit the particle's motion and speed such as critical force and time and the maximum applied force have been considered. While in living environment obstacle existence is possible, fixed and moving obstacles with random profile and distribution will be considered. Routing of viscoelastic particle considering above conditions has been performed and comparison with the previous works proved the correctness of the path. The effects of different constraints have been compared using path optimization in different situations. The time of path planning for critical force and time was about 117.657, for the maximum applied force 118.240, and for all constraints together was 120.540 s which shows that the applied force constraint has been more effective than others and increases path planning time.
中文翻译:

具有随机移动障碍物的粘弹性生物颗粒三维生存环境中的路径规划
原子力显微镜 (AFM) 的重要功能,例如在各种环境和规模下操作,使其成为不同操作中的有用设备。根据 AFM 的能力和应用,在这项工作中,提供了通过具有固定和移动障碍物的生活环境的路径,这些障碍物随机分布在整个空间中。本文根据上述应用发现了优化路径。由于对于生物应用,工具的精度对操作的成功和可靠性起着重要作用,在本文中,成本函数被定义为工具误差、施加在工具上的最大力和最大变形的组合。要最小化的粒子。在这方面,限制粒子的约束' 已经考虑了运动和速度,例如临界力和时间以及最大施加力。在生活环境中可能存在障碍物的同时,将考虑具有随机轮廓和分布的固定和移动障碍物。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。在生活环境中可能存在障碍物的同时,将考虑具有随机轮廓和分布的固定和移动障碍物。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。在生活环境中可能存在障碍物的同时,将考虑具有随机轮廓和分布的固定和移动障碍物。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。
更新日期:2021-05-11
中文翻译:
具有随机移动障碍物的粘弹性生物颗粒三维生存环境中的路径规划
原子力显微镜 (AFM) 的重要功能,例如在各种环境和规模下操作,使其成为不同操作中的有用设备。根据 AFM 的能力和应用,在这项工作中,提供了通过具有固定和移动障碍物的生活环境的路径,这些障碍物随机分布在整个空间中。本文根据上述应用发现了优化路径。由于对于生物应用,工具的精度对操作的成功和可靠性起着重要作用,在本文中,成本函数被定义为工具误差、施加在工具上的最大力和最大变形的组合。要最小化的粒子。在这方面,限制粒子的约束' 已经考虑了运动和速度,例如临界力和时间以及最大施加力。在生活环境中可能存在障碍物的同时,将考虑具有随机轮廓和分布的固定和移动障碍物。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。在生活环境中可能存在障碍物的同时,将考虑具有随机轮廓和分布的固定和移动障碍物。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。在生活环境中可能存在障碍物的同时,将考虑具有随机轮廓和分布的固定和移动障碍物。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。已经进行了考虑上述条件的粘弹性粒子的路由,并与以前的工作进行了比较,证明了路径的正确性。在不同情况下使用路径优化比较了不同约束的效果。临界力和时间的路径规划时间约为 117.657,最大施加力为 118.240,所有约束加起来为 120.540 s,这表明施加力约束比其他约束更有效并增加了路径规划时间。








































 京公网安备 11010802027423号
京公网安备 11010802027423号