当前位置:
X-MOL 学术
›
Earth Surf.Process. Land.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
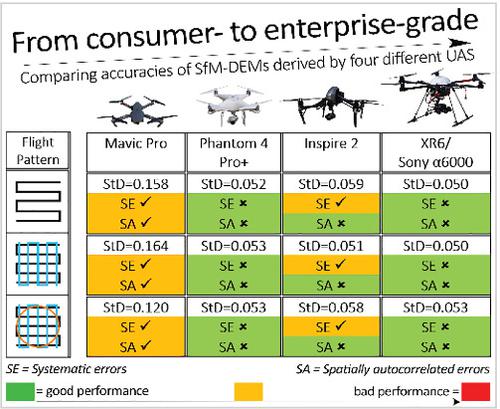
From consumer to enterprise grade: How the choice of four UAS impacts point cloud quality
Earth Surface Processes and Landforms ( IF 2.8 ) Pub Date : 2021-04-27 , DOI: 10.1002/esp.5142 Manuel Stark 1 , Tobias Heckmann 1 , Livia Piermattei 2 , Fabian Dremel 1 , Andreas Kaiser 3 , Patrick Machowski 4 , Florian Haas 1 , Michael Becht 1
Earth Surface Processes and Landforms ( IF 2.8 ) Pub Date : 2021-04-27 , DOI: 10.1002/esp.5142 Manuel Stark 1 , Tobias Heckmann 1 , Livia Piermattei 2 , Fabian Dremel 1 , Andreas Kaiser 3 , Patrick Machowski 4 , Florian Haas 1 , Michael Becht 1
Affiliation
|
Uncrewed aerial systems (UAS), combined with structure-from-motion photogrammetry, has already proven to be very powerful for a wide range of geoscience applications and different types of UAS are used for scientific and commercial purposes. However, the impact of the UAS used on the accuracy of the point clouds derived is not fully understood, especially for the quantitative analysis of geomorphic changes in complex terrain. Therefore, in this study, we aim to quantify the magnitude of systematic and random error in digital elevation models derived from four commonly used UAS (XR6/Sony α6000, Inspire 2/X4s, Phantom 4 Pro+, Mavic Pro) following different flight patterns. The vertical error of each elevation model is evaluated through comparison with 156 GNSS reference points and the normal distribution and spatial correlation of errors are analysed. Differences in mean errors (−0.4 to −1.8 cm) for the XR6, Inspire 2 and Phantom 4 Pro are significant but not relevant for most geomorphological applications. The Mavic Pro shows lower accuracies with mean errors up to 4.3 cm, thus showing a higher influence of random errors. QQ plots revealed a deviation of errors from a normal distribution in almost all data. All UAS data except Mavic Pro exhibit a pure nugget semivariogram, suggesting spatially uncorrelated errors. Compared to the other UAS, the Mavic Pro data show trends (i.e. differences increase with distance across the survey—doming) and the range of semivariances is 10 times greater. The lower accuracy of Mavic Pro can be attributed to the lower GSD at the same flight altitude and most likely, the rolling shutter sensor has an effect on the accuracy of the camera calibration. Overall, our study shows that accuracies depend highly on the chosen data sampling strategy and that the survey design used here is not suitable for calibrating all types of UAS camera equally.
中文翻译:

从消费级到企业级:四种 UAS 的选择如何影响点云质量
无人驾驶航空系统 (UAS) 与运动结构摄影测量相结合,已被证明对于广泛的地球科学应用非常强大,并且不同类型的 UAS 用于科学和商业目的。然而,所使用的UAS对点云导出精度的影响还不是很清楚,尤其是对于复杂地形地貌变化的定量分析。因此,在本研究中,我们旨在量化来自四种常用 UAS(XR6/Sony α6000、Inspire 2/X4s、Phantom 4 Pro+、Mavic Pro)的数字高程模型在不同飞行模式下的系统和随机误差的大小。通过与156个GNSS参考点的比较,评估每个高程模型的垂直误差,并分析误差的正态分布和空间相关性。XR6、Inspire 2 和 Phantom 4 Pro 的平均误差差异(-0.4 到 -1.8 厘米)很重要,但与大多数地貌应用无关。Mavic Pro 的精度较低,平均误差高达 4.3 厘米,因此随机误差的影响更大。QQ 图显示了几乎所有数据中误差与正态分布的偏差。除 Mavic Pro 外的所有 UAS 数据都表现出纯金块半变异函数,表明存在空间不相关的错误。与其他 UAS 相比,Mavic Pro 数据显示了趋势(即差异随着调查距离的增加而增加——圆顶),并且半方差的范围大 10 倍。Mavic Pro 精度较低的原因可能是在相同的飞行高度下 GSD 较低,而且很可能是滚动快门传感器对相机校准的精度有影响。总体而言,我们的研究表明,准确性在很大程度上取决于所选择的数据采样策略,并且此处使用的调查设计不适合对所有类型的 UAS 相机进行同等校准。
更新日期:2021-04-27
中文翻译:
从消费级到企业级:四种 UAS 的选择如何影响点云质量
无人驾驶航空系统 (UAS) 与运动结构摄影测量相结合,已被证明对于广泛的地球科学应用非常强大,并且不同类型的 UAS 用于科学和商业目的。然而,所使用的UAS对点云导出精度的影响还不是很清楚,尤其是对于复杂地形地貌变化的定量分析。因此,在本研究中,我们旨在量化来自四种常用 UAS(XR6/Sony α6000、Inspire 2/X4s、Phantom 4 Pro+、Mavic Pro)的数字高程模型在不同飞行模式下的系统和随机误差的大小。通过与156个GNSS参考点的比较,评估每个高程模型的垂直误差,并分析误差的正态分布和空间相关性。XR6、Inspire 2 和 Phantom 4 Pro 的平均误差差异(-0.4 到 -1.8 厘米)很重要,但与大多数地貌应用无关。Mavic Pro 的精度较低,平均误差高达 4.3 厘米,因此随机误差的影响更大。QQ 图显示了几乎所有数据中误差与正态分布的偏差。除 Mavic Pro 外的所有 UAS 数据都表现出纯金块半变异函数,表明存在空间不相关的错误。与其他 UAS 相比,Mavic Pro 数据显示了趋势(即差异随着调查距离的增加而增加——圆顶),并且半方差的范围大 10 倍。Mavic Pro 精度较低的原因可能是在相同的飞行高度下 GSD 较低,而且很可能是滚动快门传感器对相机校准的精度有影响。总体而言,我们的研究表明,准确性在很大程度上取决于所选择的数据采样策略,并且此处使用的调查设计不适合对所有类型的 UAS 相机进行同等校准。










































 京公网安备 11010802027423号
京公网安备 11010802027423号