当前位置:
X-MOL 学术
›
Int. J. Commun. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Aspects of unmanned aerial vehicles path planning: Overview and applications
International Journal of Communication Systems ( IF 1.7 ) Pub Date : 2021-04-21 , DOI: 10.1002/dac.4827 Muhammad Toaha Raza Khan 1 , Malik Muhammad Saad 1 , Yang Ru 1 , Junho Seo 1 , Dongkyun Kim 1
International Journal of Communication Systems ( IF 1.7 ) Pub Date : 2021-04-21 , DOI: 10.1002/dac.4827 Muhammad Toaha Raza Khan 1 , Malik Muhammad Saad 1 , Yang Ru 1 , Junho Seo 1 , Dongkyun Kim 1
Affiliation
|
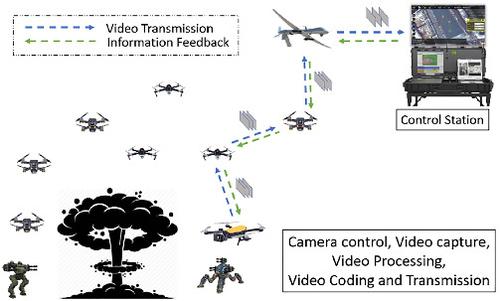
Aiming to the applications from security surveillance, military operational capabilities to the content and package delivery, unmanned aerial vehicles (UAVs) has a successfully created his space in the available technologies. The compact sized powerful flying robots are wirelessly controlled and are capable to complete tasks with and without direct human intervention. UAVs however still face serious challenges that limit the dream of complete autonomous unmanned flying machines. The key challenges include path planning and obstacle avoidance of these unmanned flying robots that are unavoidable while performing the application-specific functionalities both in indoor and outdoor environments. In this manuscript with a survey, we investigate the state-of-the-art UAV path planning algorithms and obstacle avoidance techniques. We have also summarized and compared the schemes in tabular form. In addition, current and future research directions and challenges are also discussed, showing the prospective research directions.
中文翻译:

无人机路径规划方面:概述和应用
针对从安全监视、军事行动能力到内容和包裹递送的应用,无人机 (UAV) 在可用技术中成功创造了自己的空间。紧凑型强大的飞行机器人是无线控制的,能够在有或没有直接人工干预的情况下完成任务。然而,无人机仍然面临严峻的挑战,限制了完整的自主无人飞行器的梦想。主要挑战包括这些无人驾驶飞行机器人的路径规划和避障,这些都是在室内和室外环境中执行特定应用功能时不可避免的。在这份带有调查的手稿中,我们调查了最先进的无人机路径规划算法和避障技术。我们还以表格的形式总结和比较了这些方案。此外,还讨论了当前和未来的研究方向和挑战,展示了前瞻性的研究方向。
更新日期:2021-06-03
中文翻译:
无人机路径规划方面:概述和应用
针对从安全监视、军事行动能力到内容和包裹递送的应用,无人机 (UAV) 在可用技术中成功创造了自己的空间。紧凑型强大的飞行机器人是无线控制的,能够在有或没有直接人工干预的情况下完成任务。然而,无人机仍然面临严峻的挑战,限制了完整的自主无人飞行器的梦想。主要挑战包括这些无人驾驶飞行机器人的路径规划和避障,这些都是在室内和室外环境中执行特定应用功能时不可避免的。在这份带有调查的手稿中,我们调查了最先进的无人机路径规划算法和避障技术。我们还以表格的形式总结和比较了这些方案。此外,还讨论了当前和未来的研究方向和挑战,展示了前瞻性的研究方向。










































 京公网安备 11010802027423号
京公网安备 11010802027423号