International Journal of Machine Tools and Manufacture ( IF 14.0 ) Pub Date : 2021-04-19 , DOI: 10.1016/j.ijmachtools.2021.103737 Zhi Wang , Delun Wang , Shudong Yu , Xiaopeng Li , Huimin Dong
|
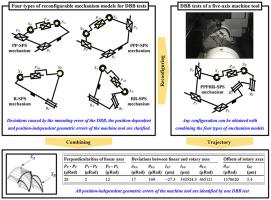
A unified approach is presented in this paper for error identification of machine tools by means of double ball bar (DBB) tests and a reconfigurable mechanism model. The mechanism model consists of a kinematic chain describing motion of the tested object and a spherical-prismatic-spherical (SPS) chain describing motion of the DBB. Depending on the types of motion of a machine tool measured, five different mechanisms, designated as PP-SPS, PPP-SPS, R–SPS, RR-SPS, and PPRRR-SPS, are employed to deal with (i) two linear axes, (ii) three linear axes, (iii) one rotary axis, (iv) two rotary axes, and (v) three linear and two rotary axes, respectively. Treating the whole DBB test loop as a mechanism allows for the measured data of the DBB, the structure parameters of the mechanism and the motion parameters to be coupled together by the displacement equations. The structure parameters are obtained using the measurements with the help of kinematic synthesis of mechanisms and saddle point programming. The position-independent geometric errors and the mounting position of the DBB, and the error motions caused by the position-dependent geometric errors of the machine tool are also discerned successfully with the proposed mechanism concept for any DBB mounting position and direction. The experimental results confirm that the proposed mechanism approach is valid for error identification of machine tools composed of the linear and rotary axes.
中文翻译:
机床双球杆测试中错误识别的可重构机构模型
本文提出了一种通过双球杆(DBB)测试和可重构机制模型来识别机床错误的统一方法。机理模型由描述被测物体运动的运动学链和描述DBB运动的球形-棱柱-球面(SPS)链组成。根据所测量机床的运动类型,采用五种不同的机制来处理(i)两个线性轴,分别称为PP-SPS,PPP-SPS,R-SPS,RR-SPS和PPRRR-SPS。 ,(ii)三个线性轴,(iii)一个旋转轴,(iv)两个旋转轴和(v)分别为三个线性轴和两个旋转轴。将整个DBB测试循环视为一种机制,可以获取DBB的测量数据,机构的结构参数和要通过位移方程耦合在一起的运动参数。通过在机构的运动学综合和鞍点编程的帮助下,通过测量获得结构参数。所提出的机构概念对于任何DBB的安装位置和方向也可以成功地识别出DBB的位置无关的几何误差和安装位置,以及由机床的位置相关的几何误差引起的误差运动。实验结果证实了所提出的机构方法对于由线性轴和旋转轴组成的机床的误差识别是有效的。所提出的机构概念对于任何DBB的安装位置和方向也可以成功地识别出DBB的位置无关的几何误差和安装位置,以及由机床的位置相关的几何误差引起的误差运动。实验结果证实了所提出的机构方法对于由线性轴和旋转轴组成的机床的误差识别是有效的。所提出的机构概念对于任何DBB的安装位置和方向也可以成功地识别出DBB的位置无关的几何误差和安装位置,以及由机床的位置相关的几何误差引起的误差运动。实验结果证实了所提出的机构方法对于由线性轴和旋转轴组成的机床的误差识别是有效的。










































 京公网安备 11010802027423号
京公网安备 11010802027423号