Medical & Biological Engineering & Computing ( IF 3.2 ) Pub Date : 2021-04-16 , DOI: 10.1007/s11517-021-02347-5 Yuyang Lin 1 , Yunlai Shi 1 , Fugang Wang 1 , Jun Zhang 2 , Haichao Sun 1 , Wenbo Wu 1
|
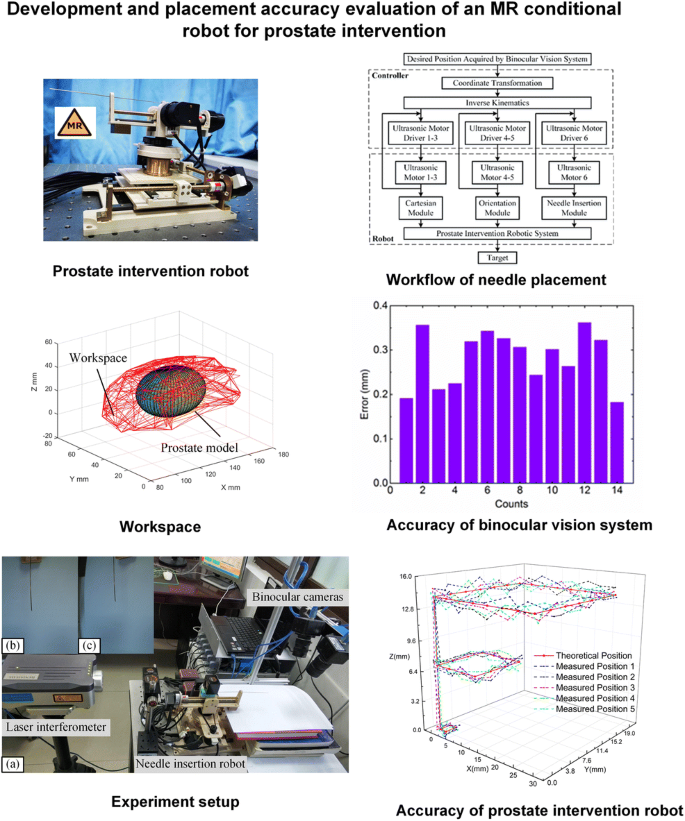
Robot-assisted prostate intervention under magnetic resonance imaging (MRI) guidance is a promising method to improve the clinical performance compared with the manual method. An MR conditional 6-DOF prostate intervention serial robot is developed and a binocular vision system (BVS) is established to evaluate the needle placement accuracy and located the penetration point precisely. The robot is designed by the MR conditional criteria. The serial configuration of the robot provides adequate flexibility and large workspace and excellent friendliness to the physicians. The kinematics are deduced and the needle placement control flow is proposed according to the configuration of the robot. The robot-assisted prostate intervention is divided into two phases including needle placement and needle penetration. A custom-made robust BVS is developed to obtain the needle tip position automatically in the needle placement phase where the needle cannot be detected by the MRI for lack of hydrogen atom. A simple and general algorithm used for needle tip camera coordinate estimation is proposed. Experiments on the BVS validation and robot accuracy evaluation are performed. The experiment results show that the errors of the BVS are under 0.3621 mm and the position error of the proposed robot is 2.815 mm which indicate the adequate accuracy for the prostate intervention.
中文翻译:
用于前列腺介入治疗的MR条件机器人的研制及放置精度评估
与手动方法相比,磁共振成像 (MRI) 引导下的机器人辅助前列腺干预是一种很有前途的方法,可以提高临床性能。研制了一种MR条件式6自由度前列腺介入串行机器人,并建立了双目视觉系统(BVS)来评估置针精度并精确定位穿刺点。机器人是根据 MR 条件标准设计的。机器人的串行配置为医生提供了足够的灵活性和大的工作空间以及极佳的友好性。推导了运动学,并根据机器人的配置提出了针放置控制流程。机器人辅助前列腺介入手术分为进针和穿刺两个阶段。开发了一种定制的鲁棒 BVS,用于在针放置阶段自动获取针尖位置,在此阶段,由于缺乏氢原子,MRI 无法检测到针。提出了一种用于针尖相机坐标估计的简单通用算法。进行了 BVS 验证和机器人精度评估的实验。实验结果表明,BVS 的误差在 0.3621 mm 以下,所提出的机器人的位置误差为 2.815 mm,表明前列腺干预具有足够的准确性。进行了 BVS 验证和机器人精度评估的实验。实验结果表明,BVS 的误差在 0.3621 mm 以下,所提出的机器人的位置误差为 2.815 mm,表明前列腺干预具有足够的准确性。进行了 BVS 验证和机器人精度评估的实验。实验结果表明,BVS 的误差在 0.3621 mm 以下,所提出的机器人的位置误差为 2.815 mm,表明前列腺干预具有足够的准确性。


























 京公网安备 11010802027423号
京公网安备 11010802027423号