Control Engineering Practice ( IF 5.4 ) Pub Date : 2021-04-07 , DOI: 10.1016/j.conengprac.2021.104788 Merlin Morlock , Valmir Bajrami , Robert Seifried
|
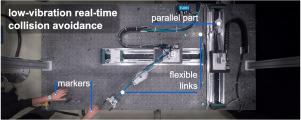
End-effector trajectory tracking of a highly flexible three-link parallel robot is combined with collision avoidance in real-time. Typical real-time collision avoidance algorithms issue commands on actuator level which can cause large oscillations within flexible robots. Thus, the needed evasive motion at the points which are about to collide is used to adapt the desired end-effector trajectory of the underactuated system, even for actuator limits and points other than the end-effector. In contrast to existing real-time collision avoidance concepts, which are essentially completely based on rigid models, a dynamic flexible model inversion is then used for tracking. Thereby, output redefinition leads to a minimum phase system. The presented computationally efficient concepts, being actuator limit and obstacle collision avoidance, use sigmoid functions providing smooth trajectories. The former calculates a braking factor for the end-effector when an actuator approaches its limit. The latter avoids external dynamic obstacles based on repulsive vectors. Experiments validate both concepts with a flexible model inversion which clearly outperforms the classical rigid body approach.
中文翻译:
具有柔性链接的并行机器人的轨迹跟踪与避免碰撞
高度灵活的三连杆并联机器人的末端执行器轨迹跟踪与实时避免碰撞功能相结合。典型的实时避免碰撞算法会在执行器级别上发出命令,这可能会导致柔性机器人内部发生较大的振荡。因此,在即将碰撞的点处所需的回避运动被用于适应欠驱动系统的期望的末端执行器轨迹,即使对于致动器极限和末端执行器以外的其他点也是如此。与基本上完全基于刚性模型的现有实时碰撞避免概念相反,然后使用动态柔性模型反演进行跟踪。由此,输出重新定义导致最小相位系统。提出的计算有效概念,即执行器限制和避免障碍物碰撞,使用可提供平滑轨迹的S型函数。前者会在执行器接近极限时计算出末端执行器的制动系数。后者避免了基于排斥向量的外部动态障碍。实验通过灵活的模型反演验证了这两个概念,该模型明显优于经典的刚体方法。










































 京公网安备 11010802027423号
京公网安备 11010802027423号