Automation in Construction ( IF 9.6 ) Pub Date : 2021-03-31 , DOI: 10.1016/j.autcon.2021.103675 Yusheng Xu , Xiaohua Tong , Uwe Stilla
|
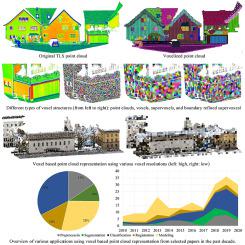
Point clouds acquired through laser scanning and stereo vision techniques have been applied in a wide range of applications, proving to be optimal sources for mapping 3D urban scenes. Point clouds provide 3D spatial coordinates of geometric surfaces, describing the real 3D world with both geometric information and attributes. However, unlike 2D images, raw point clouds are usually unstructured and contain no semantic, geometric, or topological information of objects. This lack of an adequate data structure is a bottleneck for the pre-processing or further application of raw point clouds. Thus, it is generally necessary to organize and structure the 3D discrete points into a higher-level representation, such as voxels. Using voxels to represent discrete points is a common and effective way to organize and structure 3D point clouds. Voxels, similar to pixels in an image, are abstracted 3D units with pre-defined volumes, positions, and attributes, which can be used to structurally represent discrete points in a topologically explicit and information-rich manner. Although methods and algorithms for point clouds in various fields have been frequently reported throughout the last decade, there have been very few reviews summarizing and discussing the voxel-based representation of 3D point clouds in urban scenarios. Therefore, this paper aims to conduct a thorough review of the state-of-the-art methods and applications of voxel-based point cloud representations from a collection of papers in the recent decade. In particular, we focus on the creation and utilization of voxels, as well as the strengths and weaknesses of various methods using voxels. Moreover, we also provide an analysis of the potential of using voxel-based representations in the construction industry. Finally, we provide recommendations on future research directions regarding the future tendency of the voxel-based point cloud representations and its improvements.
中文翻译:
基于体素的3D点云表示:方法,应用及其在建筑行业中的潜在用途
通过激光扫描和立体视觉技术获取的点云已被广泛应用,被证明是映射3D城市场景的最佳来源。点云提供了几何表面的3D空间坐标,用几何信息和属性来描述真实的3D世界。但是,与2D图像不同,原始点云通常是非结构化的,并且不包含对象的语义,几何或拓扑信息。缺少适当的数据结构是预处理或进一步应用原始点云的瓶颈。因此,通常需要将3D离散点组织和组织成更高级别的表示形式,例如体素。使用体素表示离散点是组织和构造3D点云的一种常见且有效的方法。体素 类似于图像中的像素的是具有预定义体积,位置和属性的抽象3D单元,可用于以拓扑显式且信息丰富的方式在结构上表示离散点。尽管在过去的十年中,已经广泛报道了各个领域中点云的方法和算法,但是很少有关于总结和讨论城市场景中基于体素的3D点云表示的评论。因此,本文旨在对近十年来一系列论文中基于体素的点云表示的最新方法和应用进行全面回顾。特别是,我们专注于体素的创建和利用,以及使用体素的各种方法的优缺点。而且,我们还提供了在建筑行业中使用基于体素的表示形式的潜力的分析。最后,我们就基于体素的点云表示形式的未来趋势及其改进提供了有关未来研究方向的建议。










































 京公网安备 11010802027423号
京公网安备 11010802027423号