Medical & Biological Engineering & Computing ( IF 3.2 ) Pub Date : 2021-03-21 , DOI: 10.1007/s11517-021-02335-9 Yanzheng Lu 1 , Hong Wang 1 , Fo Hu 1 , Bin Zhou 1 , Hailong Xi 1
|
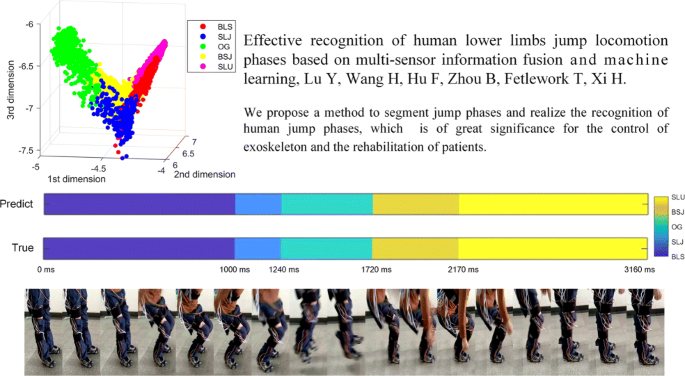
Jump locomotion is the basic movement of human. However, no thorough research on the recognition of jump sub-phases has been carried so far. This paper aims to use multi-sensor information fusion and machine learning to recognize the human jump phase, which is crucial to the development of exoskeleton that assists jumping. The method of information fusion for sensors including sEMG, IMU, and footswitch sensor is studied. The footswitch signals are filtered by median filter. A processing method of synthesizing Euler angles into phase angle is proposed, which is beneficial to data integration. The jump locomotion is creatively segmented into five phases. The onset and offset of active segment are detected by sample entropy of sEMG and standard deviation of acceleration signal. The features are extracted from analysis windows using multi-sensor information fusion, and the dimension of feature matrix is selected. By comparing the performances of state-of-the-art machine learning classifiers, feature subsets of sEMG, IMU, and footswitch signals are selected from time domain features in a series of analysis window parameters. The average recognition accuracy of sEMG and IMU is 91.76% and 97.68%, respectively. When using the combination of sEMG, IMU, and footswitch signals, the average accuracy is 98.70%, which outperforms the combination of sEMG and IMU (97.97%, p < 0.01).
中文翻译:
基于多传感器信息融合和机器学习的人体下肢跳跃运动相位的有效识别
跳跃运动是人类的基本运动。然而,到目前为止,还没有对跳跃子阶段的识别进行深入研究。本文旨在利用多传感器信息融合和机器学习来识别人类跳跃阶段,这对于辅助跳跃的外骨骼的开发至关重要。研究了sEMG、IMU、脚踏开关等传感器的信息融合方法。脚踏开关信号由中值滤波器过滤。提出了一种将欧拉角合成为相角的处理方法,有利于数据的整合。跳跃运动被创造性地分为五个阶段。通过sEMG的样本熵和加速度信号的标准偏差检测活动段的起始和偏移。使用多传感器信息融合从分析窗口中提取特征,并选择特征矩阵的维数。通过比较最先进的机器学习分类器的性能,从一系列分析窗口参数的时域特征中选择 sEMG、IMU 和脚踏开关信号的特征子集。sEMG 和 IMU 的平均识别准确率分别为 91.76% 和 97.68%。当使用 sEMG、IMU 和脚踏开关信号的组合时,平均准确率为 98.70%,优于 sEMG 和 IMU 的组合(97.97%,和脚踏开关信号是从一系列分析窗口参数中的时域特征中选择的。sEMG 和 IMU 的平均识别准确率分别为 91.76% 和 97.68%。当使用 sEMG、IMU 和脚踏开关信号的组合时,平均准确率为 98.70%,优于 sEMG 和 IMU 的组合(97.97%,和脚踏开关信号是从一系列分析窗口参数中的时域特征中选择的。sEMG 和 IMU 的平均识别准确率分别为 91.76% 和 97.68%。当使用 sEMG、IMU 和脚踏开关信号的组合时,平均准确率为 98.70%,优于 sEMG 和 IMU 的组合(97.97%,p < 0.01)。


























 京公网安备 11010802027423号
京公网安备 11010802027423号