Image and Vision Computing ( IF 4.2 ) Pub Date : 2021-03-18 , DOI: 10.1016/j.imavis.2021.104160 Nikolaos Zioulis , Federico Alvarez , Dimitrios Zarpalas , Petros Daras
|
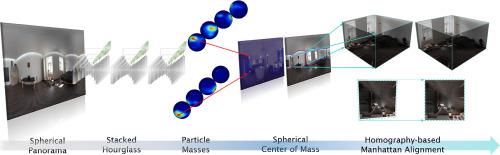
It has been shown that global scene understanding tasks like layout estimation can benefit from wider field of views, and specifically spherical panoramas. While much progress has been made recently, all previous approaches rely on intermediate representations and postprocessing to produce Manhattan-aligned estimates. In this work we show how to estimate full room layouts in a single-shot, eliminating the need for postprocessing. Our work is the first to directly infer Manhattan-aligned outputs. To achieve this, our data-driven model exploits direct coordinate regression and is supervised end-to-end. As a result, we can explicitly add quasi-Manhattan constraints, which set the necessary conditions for a homography-based Manhattan alignment module. Finally, we introduce the geodesic heatmaps and loss and a boundary-aware center of mass calculation that facilitate higher quality keypoint estimation in the spherical domain. Our models and code are publicly available at https://github.com/VCL3D/SingleShotCuboids.
中文翻译:
单次长方体:基于球面全景图的基于测地线的端到端曼哈顿对齐的布局估计
已经表明,诸如布局估计之类的全局场景理解任务可以受益于更宽的视野,尤其是球形全景图。尽管最近已经取得了很大进展,但是所有以前的方法都依赖于中间表示和后处理来生成与曼哈顿一致的估计。在这项工作中,我们展示了如何单次估算整个房间的布局,而无需进行后处理。我们的工作是第一个直接推断与曼哈顿一致的产出的工作。为此,我们的数据驱动模型利用直接坐标回归并受到端到端监督。结果,我们可以显式添加准曼哈顿约束,这为基于单应性的曼哈顿对齐模块设置了必要条件。最后,我们介绍了测地热图和损耗,以及边界感知的质心计算中心,该中心有助于在球形域中进行更高质量的关键点估计。我们的模型和代码可在https://github.com/VCL3D/SingleShotCuboids上公开获得。










































 京公网安备 11010802027423号
京公网安备 11010802027423号