Image and Vision Computing ( IF 4.2 ) Pub Date : 2021-02-24 , DOI: 10.1016/j.imavis.2021.104142 Mercedes Garcia-Salguero , Jesus Briales , Javier Gonzalez-Jimenez
|
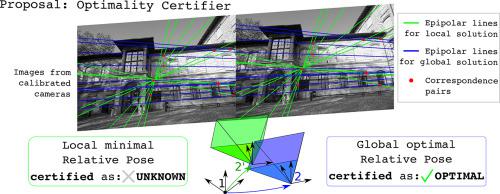
In this paper we present the first fast optimality certifier for the non-minimal version of the Relative Pose problem for calibrated cameras from epipolar constraints. The proposed certifier is based on Lagrangian duality and relies on a novel closed-form expression for dual points. We also leverage an efficient solver that performs local optimization on the manifold of the original problem's non-convex domain. The optimality of the solution is then checked via our novel fast certifier. The extensive conducted experiments demonstrate that, despite its simplicity, this certifiable solver performs excellently on synthetic data, repeatedly attaining the (certified a posteriori) optimal solution and shows a satisfactory performance on real data.
中文翻译:
可认证的相对姿势估计
在本文中,我们针对来自极线约束的校准相机,提出了针对相对姿势问题的非最小版本的第一个快速最优性证明者。提出的证明者基于拉格朗日对偶性,并且依赖于新颖的封闭形式的双点表达。我们还利用有效的求解器对原始问题的非凸域的流形执行局部优化。然后,通过我们新颖的快速验证器检查解决方案的最优性。进行的大量实验表明,尽管它简单易用,但这种可验证的求解器在合成数据上仍具有出色的性能,可反复获得(证明为后验的)最优解,并在真实数据上显示出令人满意的性能。










































 京公网安备 11010802027423号
京公网安备 11010802027423号