Journal of Visualization ( IF 1.7 ) Pub Date : 2021-02-15 , DOI: 10.1007/s12650-021-00744-4 Franklin Shaffer , Eric Ibarra , Ömer Savaş
|
Abstract
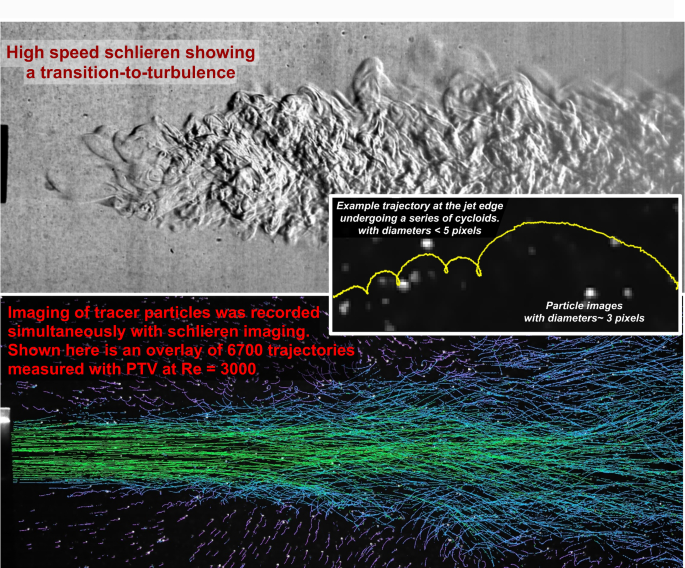
Over the past few decades, advances have been made in using particle image velocimetry (PIV) and particle tracking velocimetry (PTV) for mapping of Lagrangian velocity and acceleration flow fields. With PIV, Lagrangian trajectories are not measured directly; rather, hypothetical trajectories must be constructed from sequences of Eulerian velocity snapshots. Because PTV directly measures actual trajectories, it provides distinct advantages over PIV, especially for trajectories with abrupt changes in direction. In this work, a novel particle tracking algorithm is described, then applied to track trajectories of tracer particles in submerged turbulent jets. The Reynolds numbers ranged from 1000 to 25,000, thereby covering laminar, transitioning-to-turbulence, and fully turbulent flow regimes. The novel particle tracking algorithm is designed to handle flows with very high particle concentrations, thereby resolving small-scale flow structures. Trajectories are tracked with high velocity gradients, sharp curvatures, cycloids, abrupt changes in direction, and strong recirculation—all of which are inaccessible via construction from PIV sequences. Most trajectories measured in this work are at least 500 camera frames (time steps) long, with many being more than 3000 frames long.
Graphic abstract
中文翻译:
使用粒子跟踪测速技术可视化水下湍流射流
摘要
在过去的几十年中,使用粒子图像测速(PIV)和粒子跟踪测速(PTV)绘制拉格朗日速度场和加速度流场已取得了进展。使用PIV时,不直接测量拉格朗日轨迹。相反,必须从欧拉速度快照序列构建假设轨迹。由于PTV直接测量实际轨迹,因此与PIV相比,它具有明显的优势,特别是对于方向突然变化的轨迹。在这项工作中,描述了一种新颖的粒子跟踪算法,然后将其应用于在淹没湍流射流中跟踪示踪剂粒子的轨迹。雷诺数范围从1000到25,000,从而涵盖层流,过渡到湍流以及完全湍流的流动状态。新颖的粒子跟踪算法旨在处理非常高的粒子浓度的流,从而解决小规模的流结构。轨迹具有高速梯度,急剧的曲率,摆线,方向突然变化和强循环性,所有这些都无法通过PIV序列进行构造。这项工作中测得的大多数轨迹至少有500个摄像机帧(时间步长),而许多轨迹超过3000帧长。









































 京公网安备 11010802027423号
京公网安备 11010802027423号