Robotics and Autonomous Systems ( IF 4.3 ) Pub Date : 2021-02-15 , DOI: 10.1016/j.robot.2021.103733 Quanliang Zhao , Shiqi Liu , Jinghao Chen , Guangping He , Jiejian Di , Lei Zhao , Tingting Su , Mengying Zhang , Zhiling Hou
|
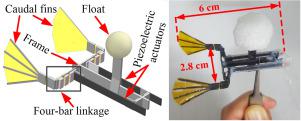
Micro-robotic fish (length 10 cm) driven by smart materials have remarkable advantages over conventional motors and piston-based robotic fish. In particular, they are highly efficient and compact. One of the key challenges is attaining high mobility with high energy density, low driving voltage and power loss. In this work, a double caudal fin micro-robotic fish actuated by two piezoelectric bimorph cantilevers is proposed and fabricated from rigid carbon fiber/resin composites and flexible polyimide hinges. Its weight is about 1.93 g and the maximum uniform swimming velocity is as high as about 0.75 BL/s (4.5 cm/s), which is much faster than previously reported micro-robotic fish actuated by ionic polymer–metal composites, shape memory alloys and dielectric elastomers. A theoretical model is validated by the experimental results and can be used to design and analyze a variety of piezoelectric robotic fish propelled by caudal fins.
中文翻译:
具有双尾鳍的快速移动压电微型机器人鱼
微型机器人鱼(长 与传统的电动机和基于活塞的机器人鱼相比,由智能材料驱动的10 cm)具有明显的优势。特别地,它们是高效且紧凑的。关键挑战之一是要实现高机动性,高能量密度,低驱动电压和功率损耗。在这项工作中,提出了一种由两个压电双压电晶片悬臂驱动的双尾鳍微型机器人鱼,该鱼由刚性碳纤维/树脂复合材料和柔性聚酰亚胺铰链制成。它的重量约为1.93克,最大均匀游泳速度高达约0.75 BL / s(4.5 cm / s),比以前报道的由离子聚合物-金属复合材料,形状记忆合金驱动的微型机器人更快和介电弹性体。










































 京公网安备 11010802027423号
京公网安备 11010802027423号