ISPRS Journal of Photogrammetry and Remote Sensing ( IF 10.6 ) Pub Date : 2021-02-14 , DOI: 10.1016/j.isprsjprs.2021.01.026 Amir Hossein Safaie , Heidar Rastiveis , Alireza Shams , Wayne A. Sarasua , Jonathan Li
|
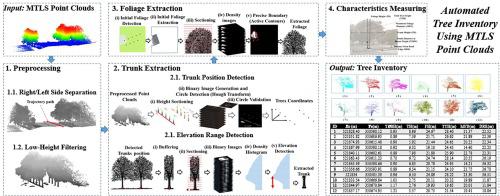
Trees are important road-side objects, and their geometric information plays an essential role in road studies and safety analyses. This paper proposes an efficient method for the automated creation of a road-side tree inventory using Mobile Terrestrial Lidar System (MTLS) point clouds. In the proposed method ground points are filtered through preprocessing to reduce processing time. Next, tree trunks are detected by performing a Hough Transform (HT) algorithm on several generated raster images from the point clouds. By initiating an approximate area of a tree’s foliage through a Voronoi Tessellation (VT) algorithm, the accurate boundary of the foliage is identified by applying Active Contour (AC) models. By extracting the points within this foliage boundary the geometric characteristics of each tree are obtained. This method was evaluated with two sample point clouds from different MTLS systems, and the algorithm correctly extracted all of the trees from both datasets. Additionally, comparing the calculated parameters with manually observed measures, the accuracy of the obtained geometric parameters were promising.
中文翻译:
使用基于Hough变换和活动轮廓的移动LiDAR点云自动进行街道树清点
树木是重要的路边物体,其几何信息在道路研究和安全分析中起着至关重要的作用。本文提出了一种使用移动陆地激光雷达系统(MTLS)点云自动创建路边树木清单的有效方法。在提出的方法中,通过预处理对地面点进行滤波,以减少处理时间。接下来,通过对从点云生成的几个栅格图像执行霍夫变换(HT)算法来检测树干。通过使用Voronoi细分(VT)算法初始化树木叶子的大致区域,可以通过应用主动轮廓(AC)模型来识别叶子的准确边界。通过提取该树叶边界内的点,可以获得每棵树的几何特征。使用来自不同MTLS系统的两个样本点云对该方法进行了评估,并且该算法正确地从两个数据集中提取了所有树。另外,将计算出的参数与人工观察到的量度进行比较,获得的几何参数的准确性是有希望的。










































 京公网安备 11010802027423号
京公网安备 11010802027423号