Automation in Construction ( IF 9.6 ) Pub Date : 2021-01-28 , DOI: 10.1016/j.autcon.2021.103573 Hye-Won Lee , Myung-Il Roh , Seung-Ho Ham
|
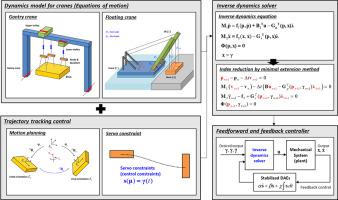
Block erection is one of the most common operations for moving a block in a shipyard. During the operation, the position and orientation of the block need to be precisely controlled to avoid accidents. However, the operation is performed manually, which is inefficient and potentially dangerous. Furthermore, the sophisticated cranes used for block erection are difficult to control. In this study, the control of a gantry and a floating crane was performed for the block erection operation. The underactuated mechanical system control theory was used, and the concept of servo constraints was applied for trajectory tracking control. Subsequently, the inverse dynamics solver was formulated, including the dynamics equations of the cranes and motion planning. A combination of feedforward and feedback controls was adopted, and reliable control was achieved using both a gantry and floating crane under various environmental conditions. The results show that the suggested method can be applied for the appropriate control of the block erection operation.
中文翻译:
用于造船自动化的欠驱动起重机控制
砌块安装是在船坞中移动砌块的最常见操作之一。在操作过程中,需要精确控制滑块的位置和方向,以免发生事故。但是,该操作是手动执行的,效率低下并且可能存在危险。此外,用于砌块安装的复杂起重机难以控制。在这项研究中,对块体安装操作进行了龙门和浮吊的控制。使用了欠驱动机械系统控制理论,并将伺服约束的概念应用于轨迹跟踪控制。随后,制定了逆动力学求解器,包括起重机的动力学方程和运动计划。前馈和反馈控制相结合,在不同的环境条件下,使用龙门起重机和浮式起重机均可实现可靠的控制。结果表明,所建议的方法可以应用于块体安装操作的适当控制。








































 京公网安备 11010802027423号
京公网安备 11010802027423号