当前位置:
X-MOL 学术
›
J. Mater. Chem. B
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Multi-functionalized micro-helical capsule robots with superior loading and releasing capabilities
Journal of Materials Chemistry B ( IF 6.1 ) Pub Date : 2020-12-24 , DOI: 10.1039/d0tb02329a Yanting Liu 1, 2, 3, 4, 5 , Yuanyuan Yang 4, 5, 6 , Xiong Yang 4, 5, 6 , Liu Yang 4, 5, 6 , Yajing Shen 4, 5, 6 , Wanfeng Shang 1, 2, 3, 4
Journal of Materials Chemistry B ( IF 6.1 ) Pub Date : 2020-12-24 , DOI: 10.1039/d0tb02329a Yanting Liu 1, 2, 3, 4, 5 , Yuanyuan Yang 4, 5, 6 , Xiong Yang 4, 5, 6 , Liu Yang 4, 5, 6 , Yajing Shen 4, 5, 6 , Wanfeng Shang 1, 2, 3, 4
Affiliation
|
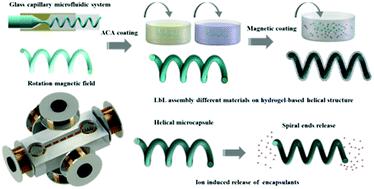
The functionalization of microrobots is essential for realizing their biomedical application in targeted cargo delivery, but the multifunctional integration of microrobots and controllable cargo delivery remains an enormous challenge at present. This work reports a kind of multi-functionalized micro-helical robot with superior loading capabilities for the controlled release of encapsulants. The magnetic microrobot, with a multilayer capsule helical structure, was developed via multifunctional strategies, including microfluidic synthesis, polyelectrolyte complexation, and surface coating with magnetic nanoparticles. The microrobot is constructed of a helical structure from a calcium alginate microfiber via a co-axial capillary microfluidic system. Then, it is coated with a polyelectrolyte complexation membrane and decorated with magnetic nanoparticles. After multi-step layer-by-layer (LbL) assembly with functionalized units, the structure is converted to a helical capsule possessing a soft and biocompatible polysaccharide alginate/chitosan/alginate shell with Fe3O4 nanoparticles decorated on the surface. The functionalized microrobot not only enables wireless steering with rotational locomotion under the control of a six degrees of freedoms (6-DOFs) electromagnetic system at different frequencies, but it also possesses stimuli-responsive abilities owing to the semi-permeable membrane, which can trigger the controllable release of encapsulants in response to ions in the environment. This work provides an efficient strategy for the superior multi-functionalization of microrobots to achieve enhanced locomotion and encapsulation performance for the loading, transport, and targeted delivery of cargo.
中文翻译:

具有卓越的加载和释放功能的多功能微螺旋胶囊机器人
微型机器人的功能化对于实现其在有针对性的货物运输中的生物医学应用至关重要,但是目前,微型机器人的多功能集成和可控货物运输仍然是一个巨大的挑战。这项工作报告了一种多功能微螺旋机器人,该机器人具有出色的加载能力,可控制释放密封剂。具有多层胶囊螺旋结构的磁性微型机器人是通过多功能策略开发的,包括微流体合成,聚电解质络合和磁性纳米颗粒表面涂层。微型机器人由藻酸钙微纤维的螺旋结构通过同轴毛细管微流体系统。然后,将其涂有聚电解质络合膜并用磁性纳米颗粒装饰。经过具有功能化单元的多步分层(LbL)组装后,该结构被转换为螺旋形胶囊,该胶囊具有柔软且生物相容的藻酸盐/壳聚糖/藻酸盐外壳和Fe 3 O 4纳米粒子装饰在表面上。功能化的微型机器人不仅可以在六自由度(6-DOF)电磁系统的控制下以不同的频率进行旋转运动的无线转向,而且由于其具有半透膜的特性,还具有刺激响应能力,可以触发响应于环境中的离子可控地释放密封剂。这项工作为微型机器人的卓越多功能化提供了一种有效的策略,以实现货物的装载,运输和目标交付的增强的运动和封装性能。
更新日期:2021-01-20
中文翻译:
具有卓越的加载和释放功能的多功能微螺旋胶囊机器人
微型机器人的功能化对于实现其在有针对性的货物运输中的生物医学应用至关重要,但是目前,微型机器人的多功能集成和可控货物运输仍然是一个巨大的挑战。这项工作报告了一种多功能微螺旋机器人,该机器人具有出色的加载能力,可控制释放密封剂。具有多层胶囊螺旋结构的磁性微型机器人是通过多功能策略开发的,包括微流体合成,聚电解质络合和磁性纳米颗粒表面涂层。微型机器人由藻酸钙微纤维的螺旋结构通过同轴毛细管微流体系统。然后,将其涂有聚电解质络合膜并用磁性纳米颗粒装饰。经过具有功能化单元的多步分层(LbL)组装后,该结构被转换为螺旋形胶囊,该胶囊具有柔软且生物相容的藻酸盐/壳聚糖/藻酸盐外壳和Fe 3 O 4纳米粒子装饰在表面上。功能化的微型机器人不仅可以在六自由度(6-DOF)电磁系统的控制下以不同的频率进行旋转运动的无线转向,而且由于其具有半透膜的特性,还具有刺激响应能力,可以触发响应于环境中的离子可控地释放密封剂。这项工作为微型机器人的卓越多功能化提供了一种有效的策略,以实现货物的装载,运输和目标交付的增强的运动和封装性能。










































 京公网安备 11010802027423号
京公网安备 11010802027423号