当前位置:
X-MOL 学术
›
Eur. J. Neurosci.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Mobile EEG reveals functionally dissociable dynamic processes supporting real-world ambulatory obstacle avoidance: Evidence for early proactive control
European Journal of Neuroscience ( IF 2.7 ) Pub Date : 2021-01-19 , DOI: 10.1111/ejn.15120 Magda Mustile 1 , Dimitrios Kourtis 1 , Simon Ladouce 2 , Gemma Learmonth 3 , David I. Donaldson 4 , Martin G. Edwards 5 , Magdalena Ietswaart 1
European Journal of Neuroscience ( IF 2.7 ) Pub Date : 2021-01-19 , DOI: 10.1111/ejn.15120 Magda Mustile 1 , Dimitrios Kourtis 1 , Simon Ladouce 2 , Gemma Learmonth 3 , David I. Donaldson 4 , Martin G. Edwards 5 , Magdalena Ietswaart 1
Affiliation
|
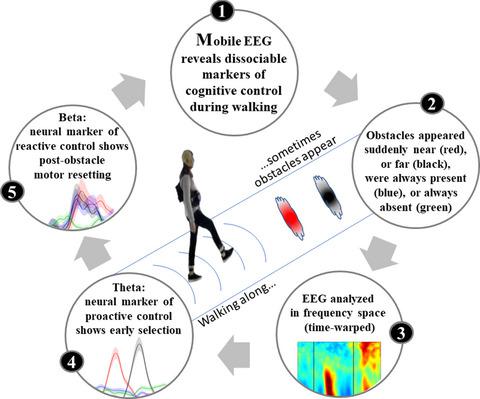
The ability to safely negotiate the world on foot takes humans years to develop, reflecting the extensive cognitive demands associated with real-time planning and control of walking. Despite the importance of walking, methodological limitations mean that surprisingly little is known about the neural and cognitive processes that support ambulatory motor control. Here, we report mobile EEG data recorded from 32 healthy young adults during real-world ambulatory obstacle avoidance. Participants walked along a path while stepping over expected and unexpected obstacles projected on the floor, allowing us to capture the dynamic oscillatory response to changes in environmental demands. Compared to obstacle-free walking, time–frequency analysis of the EEG data revealed clear neural markers of proactive and reactive forms of movement control (occurring before and after crossing an obstacle), visible as increases in frontal theta and centro-parietal beta power respectively. Critically, the temporal profile of changes in frontal theta allowed us to arbitrate between early selection and late adaptation mechanisms of proactive control. Our data show that motor plans are updated as soon as an upcoming obstacle appears, rather than when the obstacle is reached. In addition, regardless of whether motor plans required updating, a clear beta rebound was present after obstacles were crossed, reflecting the resetting of the motor system. Overall, mobile EEG recorded during real-world walking provides novel insight into the cognitive and neural basis of dynamic motor control in humans, suggesting new routes to the monitoring and rehabilitation of motor disorders such as dyspraxia and Parkinson's disease.
中文翻译:

移动脑电图揭示了支持现实世界走动避障的功能可分离动态过程:早期主动控制的证据
人类步行安全地适应世界的能力需要数年时间才能发展,这反映了与步行的实时规划和控制相关的广泛认知需求。尽管步行很重要,但方法学上的局限性意味着人们对支持动态运动控制的神经和认知过程知之甚少。在这里,我们报告了从 32 名健康的年轻人在真实世界的动态避障过程中记录的移动 EEG 数据。参与者沿着一条小路行走,同时跨过投射在地板上的预期和意外障碍,让我们能够捕捉到对环境需求变化的动态振荡响应。与无障碍行走相比,脑电图数据的时频分析揭示了主动和反应形式的运动控制(发生在穿过障碍物之前和之后)的清晰神经标记,分别表现为额叶θ和中央顶叶β功率的增加。至关重要的是,额叶 theta 变化的时间分布使我们能够在主动控制的早期选择和晚期适应机制之间进行仲裁。我们的数据显示,一旦出现即将到来的障碍物,而不是到达障碍物时,就会立即更新运动计划。此外,无论运动计划是否需要更新,越过障碍后出现明显的beta反弹,反映运动系统的重置。全面的,
更新日期:2021-01-19
中文翻译:
移动脑电图揭示了支持现实世界走动避障的功能可分离动态过程:早期主动控制的证据
人类步行安全地适应世界的能力需要数年时间才能发展,这反映了与步行的实时规划和控制相关的广泛认知需求。尽管步行很重要,但方法学上的局限性意味着人们对支持动态运动控制的神经和认知过程知之甚少。在这里,我们报告了从 32 名健康的年轻人在真实世界的动态避障过程中记录的移动 EEG 数据。参与者沿着一条小路行走,同时跨过投射在地板上的预期和意外障碍,让我们能够捕捉到对环境需求变化的动态振荡响应。与无障碍行走相比,脑电图数据的时频分析揭示了主动和反应形式的运动控制(发生在穿过障碍物之前和之后)的清晰神经标记,分别表现为额叶θ和中央顶叶β功率的增加。至关重要的是,额叶 theta 变化的时间分布使我们能够在主动控制的早期选择和晚期适应机制之间进行仲裁。我们的数据显示,一旦出现即将到来的障碍物,而不是到达障碍物时,就会立即更新运动计划。此外,无论运动计划是否需要更新,越过障碍后出现明显的beta反弹,反映运动系统的重置。全面的,










































 京公网安备 11010802027423号
京公网安备 11010802027423号