当前位置:
X-MOL 学术
›
Int. Trans. Electr. Energy Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Adaptive droop control for current sharing and bus voltage stability in DC microgrids
International Transactions on Electrical Energy Systems ( IF 1.9 ) Pub Date : 2021-01-07 , DOI: 10.1002/2050-7038.12753 Alireza Tavakoli 1 , Mehdi Forouzanfar
International Transactions on Electrical Energy Systems ( IF 1.9 ) Pub Date : 2021-01-07 , DOI: 10.1002/2050-7038.12753 Alireza Tavakoli 1 , Mehdi Forouzanfar
Affiliation
|
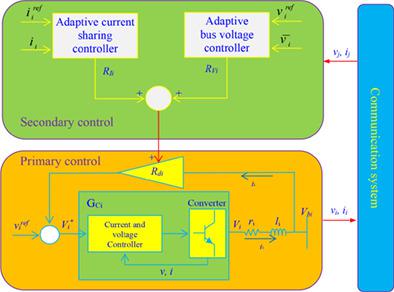
In order to achieve current sharing and bus voltage stability in distributed resources (DR) if a conventional drop control is used, a trade‐off must always be considered. When the bus voltage is restored to the nominal level, the desired current sharing is sacrificed. This paper proposes an adaptive and robust droop controller to achieve the goals of current sharing and bus voltage stability. This droop controller is a model reference adaptive control (MRAC) in which the second‐order reference transfer function is derived from the transfer function showing the dynamical behavior of DRs. In the proposed adaptive droop controller, the Lyapunov stability theory is used to extract the adaption law. The suggested adaptive droop controller is implemented in the secondary control layer and modifies the droop resistance adaptively. The effectiveness of the proposed method is validated by the experimental and simulation results.
中文翻译:

自适应下垂控制,用于直流微电网中的电流共享和总线电压稳定性
如果使用传统的压降控制,为了在分布式资源(DR)中实现电流共享和总线电压稳定性,必须始终权衡取舍。当母线电压恢复到额定水平时,会牺牲所需的均流。本文提出了一种自适应且鲁棒的下垂控制器,以实现均流和总线电压稳定性的目标。该下垂控制器是模型参考自适应控制(MRAC),其中二阶参考传递函数是从显示DR动力学行为的传递函数中推导出来的。在提出的自适应下垂控制器中,使用李雅普诺夫稳定性理论来提取自适应律。所提出的自适应下垂控制器在次级控制层中实现,并自适应地修改下垂电阻。
更新日期:2021-02-02
中文翻译:
自适应下垂控制,用于直流微电网中的电流共享和总线电压稳定性
如果使用传统的压降控制,为了在分布式资源(DR)中实现电流共享和总线电压稳定性,必须始终权衡取舍。当母线电压恢复到额定水平时,会牺牲所需的均流。本文提出了一种自适应且鲁棒的下垂控制器,以实现均流和总线电压稳定性的目标。该下垂控制器是模型参考自适应控制(MRAC),其中二阶参考传递函数是从显示DR动力学行为的传递函数中推导出来的。在提出的自适应下垂控制器中,使用李雅普诺夫稳定性理论来提取自适应律。所提出的自适应下垂控制器在次级控制层中实现,并自适应地修改下垂电阻。










































 京公网安备 11010802027423号
京公网安备 11010802027423号