当前位置:
X-MOL 学术
›
J. Mater. Chem. B
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Magnetically actuated intelligent hydrogel-based child-parent microrobots for targeted drug delivery
Journal of Materials Chemistry B ( IF 6.1 ) Pub Date : 2020-12-9 , DOI: 10.1039/d0tb02384a Weinan Chen 1, 2, 3, 4 , Yongbing Wen 1, 2, 3, 4 , Xinjian Fan 1, 2, 3, 4 , Mengmeng Sun 1, 2, 3, 4 , Chenyao Tian 1, 2, 3, 4 , Mingxuan Yang 1, 2, 3, 4 , Hui Xie 1, 2, 3, 4
Journal of Materials Chemistry B ( IF 6.1 ) Pub Date : 2020-12-9 , DOI: 10.1039/d0tb02384a Weinan Chen 1, 2, 3, 4 , Yongbing Wen 1, 2, 3, 4 , Xinjian Fan 1, 2, 3, 4 , Mengmeng Sun 1, 2, 3, 4 , Chenyao Tian 1, 2, 3, 4 , Mingxuan Yang 1, 2, 3, 4 , Hui Xie 1, 2, 3, 4
Affiliation
|
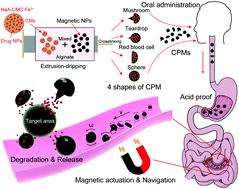
Small intestine-targeted drug delivery by oral administration has aroused the growing interest of researchers. In this work, the child-parent microrobot (CPM) as a vehicle protects the child microrobots (CMs) under a gastric acid environment and releases them in the small intestinal environment. The intelligent hydrogel-based CPMs with sphere, mushroom, red blood cell, and teardrop shapes are fabricated by an extrusion-dripping method. The CPMs package uniform CMs, which are fabricated by designed microfluidic (MF) devices. The fabrication mechanism and tunability of CMs and CPMs with different sizes and shapes are analyzed, modeled, and simulated. The shape of CPM can affect its drug release efficiency and kinetic characteristics. A vision-feedback magnetic driving system (VMDS) actuates and navigates CPM along the predefined path to the destination and continuously releases drug in the simulated intestinal fluid (SIF, a low Reynolds number (Re) regime) using a new motion control method with the tracking-learning-detection (TLD) algorithm. The newly designed CPM combines the advantages of powerful propulsion, good biocompatibility, and remarkable drug loading and release capacity at the intestinal level, which is expected to be competent for oral administration of small intestine-targeted therapy in the future.
中文翻译:

磁致驱动的基于智能智能水凝胶的儿童-父母微型机器人
通过口服给药以小肠为靶标的药物递送引起了研究人员的日益增长的兴趣。在这项工作中,儿童双亲微型机器人(CPM)作为载体在胃酸环境下保护儿童微型机器人(CM)并在小肠环境中释放它们。通过挤压滴落法制造具有球状,蘑菇状,红细胞状和泪滴状的基于水凝胶的智能CPM。CPM封装由设计的微流体(MF)装置制造的统一CM。对不同尺寸和形状的CM和CPM的制造机理和可调谐性进行了分析,建模和仿真。CPM的形状会影响其药物释放效率和动力学特性。视觉反馈磁驱动系统(VMDS)沿预定路径驱动和导航CPM到目的地,并使用一种新的运动控制方法,通过模拟的肠液(SIF,低雷诺数(Re)态)连续释放药物。跟踪学习检测(TLD)算法。新设计的CPM结合了强大的推进力,良好的生物相容性以及在肠道水平上显着的载药量和释放量的优势,有望在未来用于口服小肠靶向治疗。
更新日期:2021-01-05
中文翻译:
磁致驱动的基于智能智能水凝胶的儿童-父母微型机器人
通过口服给药以小肠为靶标的药物递送引起了研究人员的日益增长的兴趣。在这项工作中,儿童双亲微型机器人(CPM)作为载体在胃酸环境下保护儿童微型机器人(CM)并在小肠环境中释放它们。通过挤压滴落法制造具有球状,蘑菇状,红细胞状和泪滴状的基于水凝胶的智能CPM。CPM封装由设计的微流体(MF)装置制造的统一CM。对不同尺寸和形状的CM和CPM的制造机理和可调谐性进行了分析,建模和仿真。CPM的形状会影响其药物释放效率和动力学特性。视觉反馈磁驱动系统(VMDS)沿预定路径驱动和导航CPM到目的地,并使用一种新的运动控制方法,通过模拟的肠液(SIF,低雷诺数(Re)态)连续释放药物。跟踪学习检测(TLD)算法。新设计的CPM结合了强大的推进力,良好的生物相容性以及在肠道水平上显着的载药量和释放量的优势,有望在未来用于口服小肠靶向治疗。










































 京公网安备 11010802027423号
京公网安备 11010802027423号