当前位置:
X-MOL 学术
›
Comput. Graph. Forum
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Primitive Object Grasping for Finger Motion Synthesis
Computer Graphics Forum ( IF 2.7 ) Pub Date : 2020-12-29 , DOI: 10.1111/cgf.14187 Jae‐Pyung Hwang 1 , Gangrae Park 2 , Il Hong Suh 3 , Taesoo Kwon 2
Computer Graphics Forum ( IF 2.7 ) Pub Date : 2020-12-29 , DOI: 10.1111/cgf.14187 Jae‐Pyung Hwang 1 , Gangrae Park 2 , Il Hong Suh 3 , Taesoo Kwon 2
Affiliation
|
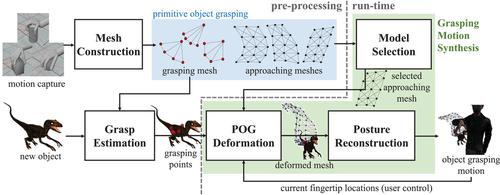
We developed a new framework to generate hand and finger grasping motions. The proposed framework provides online adaptation to the position and orientation of objects and can generate grasping motions even when the object shape differs from that used during motion capture. This is achieved by using a mesh model, which we call primitive object grasping (POG), to represent the object grasping motion. The POG model uses a mesh deformation algorithm that keeps the original shape of the mesh while adapting to varying constraints. These characteristics are beneficial for finger grasping motion synthesis that satisfies constraints for mimicking the motion capture sequence and the grasping points reflecting the shape of the object. We verify the adaptability of the proposed motion synthesizer according to its position/orientation and shape variations of different objects by using motion capture sequences for grasping primitive objects, namely, a sphere, a cylinder, and a box. In addition, a different grasp strategy called a three‐finger grasp is synthesized to validate the generality of the POG‐based synthesis framework.
中文翻译:

用于手指运动合成的原始对象抓取
我们开发了一个新的框架来生成手和手指的抓握动作。所提出的框架可以在线适应对象的位置和方向,即使对象的形状不同于运动捕捉期间使用的形状,也可以生成抓握动作。这是通过使用网格模型(我们称为原始对象抓取(POG))来表示对象抓取运动来实现的。POG模型使用网格变形算法,该算法在适应变化的约束的同时保持网格的原始形状。这些特性对于满足模仿运动捕获序列的约束以及反映对象形状的抓握点的手指抓握运动合成是有益的。我们通过使用运动捕捉序列来抓取原始对象(例如球体,圆柱体和盒子),根据所提出的运动合成器的位置/方向和不同对象的形状变化来验证其适应性。此外,还合成了另一种称为三指抓取的抓取策略,以验证基于POG的综合框架的一般性。
更新日期:2021-02-24
中文翻译:
用于手指运动合成的原始对象抓取
我们开发了一个新的框架来生成手和手指的抓握动作。所提出的框架可以在线适应对象的位置和方向,即使对象的形状不同于运动捕捉期间使用的形状,也可以生成抓握动作。这是通过使用网格模型(我们称为原始对象抓取(POG))来表示对象抓取运动来实现的。POG模型使用网格变形算法,该算法在适应变化的约束的同时保持网格的原始形状。这些特性对于满足模仿运动捕获序列的约束以及反映对象形状的抓握点的手指抓握运动合成是有益的。我们通过使用运动捕捉序列来抓取原始对象(例如球体,圆柱体和盒子),根据所提出的运动合成器的位置/方向和不同对象的形状变化来验证其适应性。此外,还合成了另一种称为三指抓取的抓取策略,以验证基于POG的综合框架的一般性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号