Ocean Engineering ( IF 4.6 ) Pub Date : 2020-12-29 , DOI: 10.1016/j.oceaneng.2020.108533 Shuang Zhao , Zhenjie Wang , Zhixi Nie , Kaifei He , Ning Ding
|
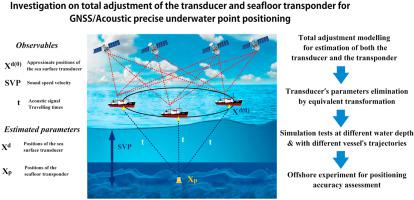
Global navigation satellite system/acoustic (GNSS/A) underwater positioning technique has drawn increasing attention in the fields of marine scientific research and engineering application. The conventional positioning strategy of GNSS/A is to fix the positions of sea-surface transducer, in other words, the positions of the transducer determined by GNSS positioning at different epochs are regarded as accurate and unbiased, and then estimate the underwater transponder's coordinate with acoustic ranging data. However, there inevitably exists bias in the estimation of transducer's positions, and the precision varies at different epochs. Ignoring precision differences of the transducer's positions will lead to a worse estimation of the transponder's coordinate. In this contribution, we propose a total adjustment (TA) method, where the positions of both sea-surface transducer and seafloor transponder are treated as unknown parameters, and the transducer's positions determined by GNSS positioning at different epochs are introduced as virtual observations. In order to reduce the computation load caused by large increase of estimation parameters, an equivalent transformation is applied to observation equations to remove estimation parameters for the transducer's positions at different epochs. To evaluate the performance of the proposed total adjustment method, a series of simulation tests and a sea-trail experiment were carried out. Testing results show that, as compared with the traditional method, the positioning accuracy with the proposed method can be improved by about 10%–33% in the simulation tests and 15% in the field test.
中文翻译:
用于GNSS /声波精确水下点定位的传感器和海底应答器总调整的研究
全球导航卫星系统/声学(GNSS / A)水下定位技术已在海洋科学研究和工程应用领域引起了越来越多的关注。GNSS / A的常规定位策略是固定海面传感器的位置,换言之,由GNSS定位确定的传感器位置在不同时期是准确无偏的,然后估计水下应答器的坐标为声音测距数据。然而,在换能器位置的估计中不可避免地存在偏差,并且精度在不同的时期变化。忽略换能器位置的精度差异将导致对应答器坐标的更差估计。在此文稿中,我们提出了总调整(TA)方法,其中将海面换能器和海底应答器的位置均视为未知参数,并将由GNSS定位在不同时期确定的换能器位置作为虚拟观测值。为了减少由于估计参数的大量增加而引起的计算负担,将等效变换应用于观察方程,以删除换能器在不同时期的位置的估计参数。为了评估所提出的总体调整方法的性能,进行了一系列模拟测试和海底实验。测试结果表明,与传统方法相比,该方法的定位精度在模拟测试中可提高约10%–33%,在现场测试中可提高15%。










































 京公网安备 11010802027423号
京公网安备 11010802027423号