Simulation Modelling Practice and Theory ( IF 3.5 ) Pub Date : 2020-12-23 , DOI: 10.1016/j.simpat.2020.102243 Lars I. Hatledal , Yingguang Chu , Arne Styve , Houxiang Zhang
|
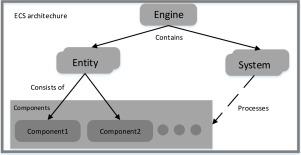
This paper introduces a novel co-simulation framework running on the Java Virtual Machine built on a software architecture known as the Entity-Component-System. Popularised by games, this architecture favours composition over inheritance, allowing for greater flexibility. Rather than using a fixed inheritance tree, an entity is defined by its traits, which can be seamlessly changed during simulation. The framework supports the Functional Mock-up Interface standard for co-simulation, as well as the System Structure and Parameterisation standard for defining the system structure. Furthermore, the employed architecture allows users to seamlessly integrate physics engines, plotting, 3D visualisation, co-simulation masters and other types of systems into the framework in a modular way. To show its effectiveness, this paper compares the framework to four similar open-source co-simulation frameworks by simulating a quarter-truck system defined using the System Structure and Parameterisation standard.
中文翻译:
Vico:基于实体组件系统的协同仿真框架
本文介绍了在Java虚拟机上运行的新颖的协同仿真框架,该框架基于称为Entity-Component-System的软件体系结构构建。随着游戏的普及,这种体系结构更倾向于继承而不是继承,从而具有更大的灵活性。由实体的特征定义实体,而不是使用固定的继承树,可以在仿真过程中对其进行无缝更改。该框架支持用于共同仿真的功能模型接口标准,以及用于定义系统结构的系统结构和参数化标准。此外,采用的体系结构允许用户以模块化的方式将物理引擎,绘图,3D可视化,协同仿真母版和其他类型的系统无缝集成到框架中。为了展示其有效性,










































 京公网安备 11010802027423号
京公网安备 11010802027423号