Precision Engineering ( IF 3.5 ) Pub Date : 2020-12-21 , DOI: 10.1016/j.precisioneng.2020.12.015 Weichen Sun , Zhijing Zhang , Lingling Shi , Ngaiming Kwok , Weimin Zhang , Mingkuan Shi
|
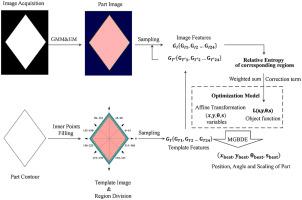
Recognition and localization of mechanical parts using machine vision is a common approach in precision assembly systems. However, positional inaccuracy in assembly systems often produces unfocused images. Hence, existing methods of part recognition and localization are vulnerable to failure. In this paper, we present a part recognition and localization method, based on relative entropy, which can be applied to small samples. First, a template image is generated based on the contour of the parts and divided into several regions. The intensity distribution of the regions was sampled to generate template features. Then, the captured image is segmented using the Gaussian mixture model and the expectation maximum algorithm to extract the target part in the image. Part features are also generated by sampling the target part image using the template features. Furthermore, an optimization model is established in which the objective function is the sum of the relative entropy between the image features, the template features, and the region matching error correction term. By solving the optimization model, the location of the part can be obtained. The proposed method is compared with the edge and invariant feature-based methods through experiments. The results show that the proposed method has higher robustness and is suitable for the recognition and localization of parts with unfocused images. By using this method, the flexibility and reliability of precision assembly systems can be improved.
中文翻译:
使用相对熵从精密装配系统中的未聚焦图像中识别和定位小样本零件
使用机器视觉识别和定位机械零件是精密装配系统中的常见方法。但是,装配系统中的位置误差通常会产生未聚焦的图像。因此,现有的零件识别和定位方法很容易发生故障。在本文中,我们提出了一种基于相对熵的零件识别和定位方法,该方法可以应用于小样本。首先,根据零件的轮廓生成模板图像并将其分为几个区域。采样区域的强度分布以生成模板特征。然后,使用高斯混合模型和期望最大值算法对捕获的图像进行分割,以提取图像中的目标部分。零件特征也是通过使用模板特征对目标零件图像进行采样而生成的。此外,建立优化模型,其中目标函数是图像特征,模板特征和区域匹配误差校正项之间的相对熵之和。通过求解优化模型,可以获得零件的位置。通过实验,将该方法与基于边缘和不变特征的方法进行了比较。结果表明,该方法具有较高的鲁棒性,适用于非聚焦图像零件的识别和定位。通过使用这种方法,可以提高精密装配系统的灵活性和可靠性。建立优化模型,其中目标函数是图像特征,模板特征和区域匹配误差校正项之间的相对熵之和。通过求解优化模型,可以获得零件的位置。通过实验,将该方法与基于边缘和不变特征的方法进行了比较。结果表明,该方法具有较高的鲁棒性,适用于非聚焦图像零件的识别和定位。通过使用这种方法,可以提高精密装配系统的灵活性和可靠性。建立优化模型,其中目标函数是图像特征,模板特征和区域匹配误差校正项之间的相对熵之和。通过求解优化模型,可以获得零件的位置。通过实验将所提出的方法与基于边缘和不变特征的方法进行了比较。结果表明,该方法具有较高的鲁棒性,适用于非聚焦图像零件的识别和定位。通过使用这种方法,可以提高精密装配系统的灵活性和可靠性。通过实验,将该方法与基于边缘和不变特征的方法进行了比较。结果表明,该方法具有较高的鲁棒性,适用于非聚焦图像零件的识别和定位。通过使用这种方法,可以提高精密装配系统的灵活性和可靠性。通过实验,将该方法与基于边缘和不变特征的方法进行了比较。结果表明,该方法具有较高的鲁棒性,适用于非聚焦图像零件的识别和定位。通过使用这种方法,可以提高精密装配系统的灵活性和可靠性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号