当前位置:
X-MOL 学术
›
Planet. Space Sci.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Attitude reconstruction of MASCOT lander during its descent and stay on asteroid (162173) Ryugu
Planetary and Space Science ( IF 1.8 ) Pub Date : 2020-12-03 , DOI: 10.1016/j.pss.2020.105150 Romain Garmier , Alex Torres , Thierry Martin , Laurence Lorda , Elisabet Canalias , Aurelie Moussi , Jens Biele , Frank Scholten , Ralf Jaumann , Tra-Mi Ho , Yuya Mimasu , Yuichi Tsuda
Planetary and Space Science ( IF 1.8 ) Pub Date : 2020-12-03 , DOI: 10.1016/j.pss.2020.105150 Romain Garmier , Alex Torres , Thierry Martin , Laurence Lorda , Elisabet Canalias , Aurelie Moussi , Jens Biele , Frank Scholten , Ralf Jaumann , Tra-Mi Ho , Yuya Mimasu , Yuichi Tsuda
|
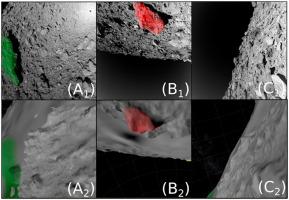
Hayabusa-2, a JAXA mission, reached C-type asteroid (162173) Ryugu in June 2018. Hayabusa2 carried MASCOT (Ho et al., 2016), a small lander developed by DLR and CNES. The goal of MASCOT was to perform in situ measurements on the surface of the asteroid by means of its four scientific instruments, substantially contributing in this way to the overall scientific return of Hayabusa2 mission. MASCOT landing occurred the October 3, 2018. After its release by Hayabusa2 spacecraft, the MASCOT lander experienced 17 min of descent and bounces. Then after stabilization it collected measurements during 17 h, visiting three slightly different sites. A comprehensive knowledge of MASCOT’s attitudes on the various moment of its mission is essential for the understanding of the science data gathered by the scout. CNES flight dynamics team was involved in the reconstruction of MASCOT landing trajectory and attitude. This paper presents the attitude reconstruction of MASCOT during its descent and on its second landing site. The reconstruction used as inputs the housekeeping data generated by the 6 Photo Electric Cells of MASCOT, as well as the images acquired by Hayabusa2 ONC camera and the MASCAM camera. The assessment was very complex but we determined the attitude with a mean accuracy around 10° during descent and 8° when MASCOT was stable once the second landing site was successfully reached. Nevertheless, for the other phases - bounces, first landing site and last landing site-the lander attitude is still undetermined.
中文翻译:

MASCOT 着陆器在下降和停留在小行星期间的姿态重建 (162173) Ryugu
JAXA 任务隼鸟 2 号于 2018 年 6 月到达 C 型小行星 (162173) Ryugu。隼鸟 2 号携带 MASCOT(Ho 等人,2016),这是由 DLR 和 CNES 开发的小型着陆器。 MASCOT 的目标是通过其四台科学仪器对小行星表面进行原位测量,从而为隼鸟二号任务的整体科学返回做出重大贡献。 MASCOT 着陆发生于 2018 年 10 月 3 日。由隼鸟 2 号航天器释放后,MASCOT 着陆器经历了 17 分钟的下降和弹跳。然后,在稳定后,它在 17 小时内收集了测量结果,访问了三个略有不同的地点。全面了解 MASCOT 在执行任务的各个时刻的态度对于理解侦察员收集的科学数据至关重要。 CNES飞行动力学团队参与了MASCOT着陆轨迹和姿态的重建。本文介绍了 MASCOT 在下降过程中和第二个着陆点的姿态重建。重建过程使用 MASCOT 的 6 个光电电池生成的内务数据以及 Hayabusa2 ONC 相机和 MASCAM 相机获取的图像作为输入。评估非常复杂,但我们确定了下降过程中平均精度约为 10° 的姿态,以及成功到达第二个着陆点后 MASCOT 稳定时的平均精度为 8°。然而,对于其他阶段——弹跳、第一个着陆点和最后一个着陆点——着陆器姿态仍然不确定。
更新日期:2020-12-03
中文翻译:
MASCOT 着陆器在下降和停留在小行星期间的姿态重建 (162173) Ryugu
JAXA 任务隼鸟 2 号于 2018 年 6 月到达 C 型小行星 (162173) Ryugu。隼鸟 2 号携带 MASCOT(Ho 等人,2016),这是由 DLR 和 CNES 开发的小型着陆器。 MASCOT 的目标是通过其四台科学仪器对小行星表面进行原位测量,从而为隼鸟二号任务的整体科学返回做出重大贡献。 MASCOT 着陆发生于 2018 年 10 月 3 日。由隼鸟 2 号航天器释放后,MASCOT 着陆器经历了 17 分钟的下降和弹跳。然后,在稳定后,它在 17 小时内收集了测量结果,访问了三个略有不同的地点。全面了解 MASCOT 在执行任务的各个时刻的态度对于理解侦察员收集的科学数据至关重要。 CNES飞行动力学团队参与了MASCOT着陆轨迹和姿态的重建。本文介绍了 MASCOT 在下降过程中和第二个着陆点的姿态重建。重建过程使用 MASCOT 的 6 个光电电池生成的内务数据以及 Hayabusa2 ONC 相机和 MASCAM 相机获取的图像作为输入。评估非常复杂,但我们确定了下降过程中平均精度约为 10° 的姿态,以及成功到达第二个着陆点后 MASCOT 稳定时的平均精度为 8°。然而,对于其他阶段——弹跳、第一个着陆点和最后一个着陆点——着陆器姿态仍然不确定。










































 京公网安备 11010802027423号
京公网安备 11010802027423号