当前位置:
X-MOL 学术
›
J. Terramech.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
An approach to characterization of the agricultural self-propelled machines stability
Journal of Terramechanics ( IF 2.4 ) Pub Date : 2021-02-01 , DOI: 10.1016/j.jterra.2020.11.001 Dragan V. Petrović , Vera B. Cerović , Rade L. Radojević , Zoran I. Mileusnić
Journal of Terramechanics ( IF 2.4 ) Pub Date : 2021-02-01 , DOI: 10.1016/j.jterra.2020.11.001 Dragan V. Petrović , Vera B. Cerović , Rade L. Radojević , Zoran I. Mileusnić
|
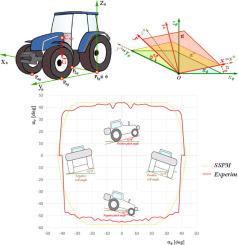
Abstract This paper presents an analytical algorithm with appropriate software specified for the approximation of the allowed critical slope of the solid flat terrain that guarantees static and/or dynamic stability of the specified self-propelled agricultural machines and their aggregates. This algorithm assumes machine as a rigid body, having 3 or 4 contact points (defined by wheels or crawlers), under uniform motion at different constant velocities and radii of curvature trajectories. Using this algorithm, based on the principles of theoretical mechanics combined with 3D analytical geometry, the computer program SSPM ( s tability of the s elf-propelled agricultural m achines) has been coded. This software is intended to facilitate the analysis, comparison and optimization of different configurations of self-propelled agricultural machines in operation on horizontal and sloped flat terrains at constant velocities and radii of trajectory with respect to their static and dynamic stability. It calculates critical pitch and roll angles of the self-propelled machine and the maximum allowed slope of the flat terrain under the given conditions. The algorithm and the appropriate SSPM software were experimentally verified using the platform and low-scale tractor model. Average difference between calculated and experimental critical values of roll and pitch angles were about 4°
中文翻译:

农用自走机械稳定性表征方法
摘要 本文提出了一种带有适当软件的分析算法,用于近似实心平坦地形的允许临界坡度,以保证指定的自走式农业机械及其集料的静态和/或动态稳定性。该算法假设机器为刚体,具有 3 或 4 个接触点(由轮子或履带定义),以不同的恒定速度和曲率轨迹半径匀速运动。使用该算法,基于理论力学原理结合3D解析几何,对计算机程序SSPM(自推进农业机械的稳定性)进行了编码。该软件旨在促进分析,在水平和倾斜平坦地形上以恒定速度和轨迹半径运行的自走式农业机械的不同配置的静态和动态稳定性的比较和优化。它计算自航机的临界俯仰角和横滚角以及给定条件下平坦地形的最大允许坡度。使用平台和小规模拖拉机模型对算法和适当的 SSPM 软件进行了实验验证。滚转角和俯仰角的计算临界值与实验临界值之间的平均差异约为 4° 它计算自航机的临界俯仰角和横滚角以及给定条件下平坦地形的最大允许坡度。使用平台和小规模拖拉机模型对算法和适当的 SSPM 软件进行了实验验证。滚转角和俯仰角的计算临界值与实验临界值之间的平均差异约为 4° 它计算自航机的临界俯仰角和横滚角以及给定条件下平坦地形的最大允许坡度。使用平台和小规模拖拉机模型对算法和适当的 SSPM 软件进行了实验验证。滚转角和俯仰角的计算临界值与实验临界值之间的平均差异约为 4°
更新日期:2021-02-01
中文翻译:
农用自走机械稳定性表征方法
摘要 本文提出了一种带有适当软件的分析算法,用于近似实心平坦地形的允许临界坡度,以保证指定的自走式农业机械及其集料的静态和/或动态稳定性。该算法假设机器为刚体,具有 3 或 4 个接触点(由轮子或履带定义),以不同的恒定速度和曲率轨迹半径匀速运动。使用该算法,基于理论力学原理结合3D解析几何,对计算机程序SSPM(自推进农业机械的稳定性)进行了编码。该软件旨在促进分析,在水平和倾斜平坦地形上以恒定速度和轨迹半径运行的自走式农业机械的不同配置的静态和动态稳定性的比较和优化。它计算自航机的临界俯仰角和横滚角以及给定条件下平坦地形的最大允许坡度。使用平台和小规模拖拉机模型对算法和适当的 SSPM 软件进行了实验验证。滚转角和俯仰角的计算临界值与实验临界值之间的平均差异约为 4° 它计算自航机的临界俯仰角和横滚角以及给定条件下平坦地形的最大允许坡度。使用平台和小规模拖拉机模型对算法和适当的 SSPM 软件进行了实验验证。滚转角和俯仰角的计算临界值与实验临界值之间的平均差异约为 4° 它计算自航机的临界俯仰角和横滚角以及给定条件下平坦地形的最大允许坡度。使用平台和小规模拖拉机模型对算法和适当的 SSPM 软件进行了实验验证。滚转角和俯仰角的计算临界值与实验临界值之间的平均差异约为 4°










































 京公网安备 11010802027423号
京公网安备 11010802027423号