当前位置:
X-MOL 学术
›
J. Softw. Evol. Process
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
A model to discipline autonomy in cyber-physical systems-of-systems and its application
Journal of Software: Evolution and Process ( IF 2 ) Pub Date : 2020-11-23 , DOI: 10.1002/smr.2328 Mohamad Gharib 1 , Leandro Dias da Silva 2 , Andrea Ceccarelli 1
Journal of Software: Evolution and Process ( IF 2 ) Pub Date : 2020-11-23 , DOI: 10.1002/smr.2328 Mohamad Gharib 1 , Leandro Dias da Silva 2 , Andrea Ceccarelli 1
Affiliation
|
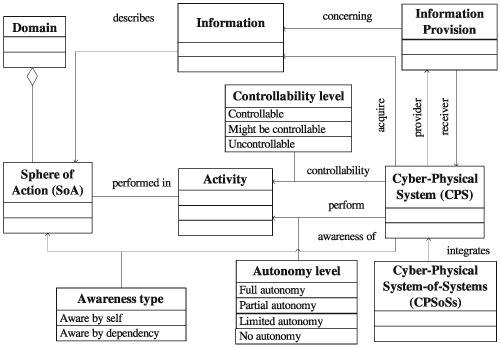
A cyber-physical system-of-systems (CPSoS) can be defined as a system-of-systems (SoS), composed of several operable and autonomous constituent systems (CSs) that are themselves cyber-physical systems (CPSs). A main challenge in integrating CPSoS to function as a single integrated system is the autonomy of its components, which may result in undesirable, unsecure, or even unsafe situations. In this paper, we advocate that in order to facilitate the integration of CPSs within the overall context of their CPSoS, we may need to adjust their level of autonomy in a way that enables them to perform their activities and avoid undesirable, unsecure , and unsafe situations. Reducing such situations surely contributes to the dependability of the CPSoS. In particular, we propose a novel model-based approach for modeling and analyzing the autonomy levels of CPSs based on their awareness concerning their operational environment as well as their capability to react in a timely, secure, and safe manner while performing their activities. The model is further described in a UML profile and applied to represent activities for autonomous driving scenarios. Using a driving simulator, we implement such models on a target vehicle, and we show the resulting safety improvement, especially in terms of reduced collisions.
中文翻译:

网络物理系统系统中的自治模型及其应用
网络物理系统系统 (CPSoS) 可以定义为系统系统 (SoS),由多个可操作的自主组成系统 (CS) 组成,这些系统本身就是网络物理系统 (CPS)。将 CPSoS 集成为单个集成系统的主要挑战是其组件的自主性,这可能会导致不良、不安全甚至不安全的情况。在本文中,我们主张为了促进 CPS 在其 CPSoS 的整体背景下的整合,我们可能需要调整它们的自主程度,使它们能够执行其活动并避免不受欢迎、不安全和不安全的情况。情况。减少这种情况肯定有助于提高 CPSoS 的可靠性。特别是,我们提出了一种新的基于模型的方法,用于根据 CPS 对其操作环境的认识以及在执行其活动时及时、安全和安全地做出反应的能力,对 CPS 的自治级别进行建模和分析。该模型在 UML 配置文件中进一步描述,并应用于表示自动驾驶场景的活动。使用驾驶模拟器,我们在目标车辆上实施此类模型,并展示由此产生的安全性改进,尤其是在减少碰撞方面。
更新日期:2020-11-23
中文翻译:
网络物理系统系统中的自治模型及其应用
网络物理系统系统 (CPSoS) 可以定义为系统系统 (SoS),由多个可操作的自主组成系统 (CS) 组成,这些系统本身就是网络物理系统 (CPS)。将 CPSoS 集成为单个集成系统的主要挑战是其组件的自主性,这可能会导致不良、不安全甚至不安全的情况。在本文中,我们主张为了促进 CPS 在其 CPSoS 的整体背景下的整合,我们可能需要调整它们的自主程度,使它们能够执行其活动并避免不受欢迎、不安全和不安全的情况。情况。减少这种情况肯定有助于提高 CPSoS 的可靠性。特别是,我们提出了一种新的基于模型的方法,用于根据 CPS 对其操作环境的认识以及在执行其活动时及时、安全和安全地做出反应的能力,对 CPS 的自治级别进行建模和分析。该模型在 UML 配置文件中进一步描述,并应用于表示自动驾驶场景的活动。使用驾驶模拟器,我们在目标车辆上实施此类模型,并展示由此产生的安全性改进,尤其是在减少碰撞方面。


























 京公网安备 11010802027423号
京公网安备 11010802027423号